In questo secondo volume di esercizi sui massimi e minimi vincolati per funzioni in più variabili presentiamo ulteriori 9 problemi sulla ricerca dei punti di massimo e minimo di una funzione su un insieme compatto  . Come in Massimi e minimi vincolati – Esercizi – Volume 1, lo studio riguarda sia la parte interna di
. Come in Massimi e minimi vincolati – Esercizi – Volume 1, lo studio riguarda sia la parte interna di  , sia particolarmente il bordo
, sia particolarmente il bordo  , mediante parametrizzazione o il metodo dei moltiplicatori di Lagrange.
, mediante parametrizzazione o il metodo dei moltiplicatori di Lagrange.
Gli esercizi sono completamente risolti, offrendo spesso più soluzioni alternative per aumentare la varietà di tecniche mostrata al lettore.
Questo secondo volume arricchisce e completa quindi il lavoro contenuto nella prima porzione di esercizi, ed è rivolto a studenti e appassionati.
Segnaliamo il seguente materiale su argomenti correlati:
- Esercizi su punti stazionari con determinante hessiano nullo;
- Guida ai Massimi e Minimi: Tecniche e Teoria nelle Funzioni Multivariabili;
- Esercizi su massimi e minimi liberi per funzioni in più variabili;
- Esercizi sui limiti in due variabili.
Buona lettura!
Autori e revisori
Leggi...
Revisori: Matteo Talluri, Davide La Manna, Jacopo Garofali, Daniele Bjørn Malesani, Silvia Lombardi, Valerio Brunetti.
Introduzione
Leggi...
 . Essa è composta da esercizi di varia difficoltà ed è rivolta a studenti di Ingegneria, Fisica e Matematica che desiderano affrontare l’esame di Analisi 2. Tutti gli esercizi presentano una soluzione convenzionale, mentre alcuni ne hanno altre più ad hoc. L’obiettivo è quello di suggerire allo studente strade alternative per risolvere l’esercizio più velocemente. Gli strumenti utilizzati sono il Teorema di Fermat per quanto riguarda la parte interna dell’insieme, mentre per la sua frontiera adotteremo il metodo della parametrizzazione, qualora possibile, o il metodo dei moltiplicatori di Lagrange, quando il vincolo è espresso come luogo di zeri.
. Essa è composta da esercizi di varia difficoltà ed è rivolta a studenti di Ingegneria, Fisica e Matematica che desiderano affrontare l’esame di Analisi 2. Tutti gli esercizi presentano una soluzione convenzionale, mentre alcuni ne hanno altre più ad hoc. L’obiettivo è quello di suggerire allo studente strade alternative per risolvere l’esercizio più velocemente. Gli strumenti utilizzati sono il Teorema di Fermat per quanto riguarda la parte interna dell’insieme, mentre per la sua frontiera adotteremo il metodo della parametrizzazione, qualora possibile, o il metodo dei moltiplicatori di Lagrange, quando il vincolo è espresso come luogo di zeri.Richiami di teoria
Leggi...
 un insieme compatto e sia
un insieme compatto e sia  una funzione continua. Allora
una funzione continua. Allora  ammette massimo e minimo su
ammette massimo e minimo su  .
.
 è compatto se e solo se è chiuso e limitato.
è compatto se e solo se è chiuso e limitato.
 un insieme aperto,
un insieme aperto,  e
e  tale che è differenziabile in
tale che è differenziabile in  . Allora, se è un punto di massimo o minimo relativo per su
. Allora, se è un punto di massimo o minimo relativo per su  , vale
, vale  .
.
 una funzione differenziabile su tutto , insieme aperto. Allora, tutti i punti di massimo o minimo relativo di su sono, in particolare, punti critici.
una funzione differenziabile su tutto , insieme aperto. Allora, tutti i punti di massimo o minimo relativo di su sono, in particolare, punti critici.
 due funzioni di classe
due funzioni di classe  , sia
, sia  . Supponiamo che
. Supponiamo che  sia un punto di massimo o minimo di su
sia un punto di massimo o minimo di su  e che
e che  , allora
, allora  tale che
tale che

 funzioni differenziabili e sia
funzioni differenziabili e sia

Supponiamo che  sia punto di massimo o di minimo relativo per su e che i vettori
sia punto di massimo o di minimo relativo per su e che i vettori  non siano linearmente dipendenti. Allora, definita la Lagrangiana
non siano linearmente dipendenti. Allora, definita la Lagrangiana  ,
,

vale

cioè  è un punto critico della Lagrangiana.
è un punto critico della Lagrangiana.
Esercizi
![\[\quad\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-27e49cccda278470ae7436bace68813e_l3.svg "Rendered by QuickLaTeX.com")
 . Data la funzione
. Data la funzione  definita da
definita da
![\[f(x,y,z):=4x+y+z^2,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-60ab89a173b899b61dac982c4f6147a3_l3.svg "Rendered by QuickLaTeX.com")
determinare, se esistono, il massimo e il minimo di sull’insieme
![\[A:=\{(x,y,z)\in\mathbb{R}^3\mid x^2+y^2\leq z\leq 4\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-572992f4b6f50af7b57a80212830e915_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento 1.
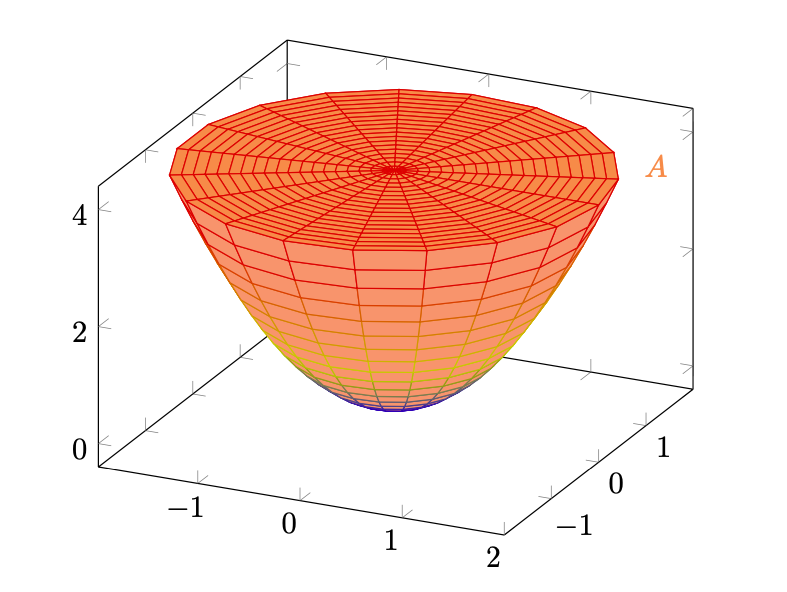
Figura 1: l’insieme .
Osserviamo che è un polinomio, pertanto è una funzione continua su , mentre l’insieme è chiuso e limitato. La chiusura segue dal fatto che è intersezione di controimmagini di insiemi chiusi di  tramite funzioni continue, mentre per la limitatezza notiamo che esso è un settore di paraboloide ellittico, contenuto in una sfera di raggio
tramite funzioni continue, mentre per la limitatezza notiamo che esso è un settore di paraboloide ellittico, contenuto in una sfera di raggio  . Infatti, dalle equazioni definenti , per ogni
. Infatti, dalle equazioni definenti , per ogni  risulta
risulta

Dunque è un chiuso e limitato di , compatto per il teorema di Heine-Borel. Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
Distinguiamo l’insieme nella sua parte interna e la sua frontiera:  . Studiamo separatamente e in maniera differente le due componenti.
. Studiamo separatamente e in maniera differente le due componenti.
 ) Essendo differenziabile sull’insieme aperto , il teorema di Fermat ci assicura che gli estremi relativi di in vanno ricercati tra i suoi eventuali punti critici in , ovvero i punti
) Essendo differenziabile sull’insieme aperto , il teorema di Fermat ci assicura che gli estremi relativi di in vanno ricercati tra i suoi eventuali punti critici in , ovvero i punti  tali che
tali che  e scartare tutti i punti che non soddisfano tale condizione. Calcoliamo il gradiente di svolgendo le derivate parziali:
e scartare tutti i punti che non soddisfano tale condizione. Calcoliamo il gradiente di svolgendo le derivate parziali:
![\[\begin{cases} \dfrac{\partial f}{\partial x}(x,y)=4\\\\ \dfrac{\partial f}{\partial y}(x,y)=1\\\\ \dfrac{\partial f}{\partial z}(x,y)=2z, \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9d177d0a3ce1ab5abe9980e128c6b940_l3.svg "Rendered by QuickLaTeX.com")
dunque  , che non si annulla per nessuna scelta di
, che non si annulla per nessuna scelta di  . Ciò significa che non vi sono punti critici.
. Ciò significa che non vi sono punti critici.
 ) La frontiera di sarà descritta dalle equazioni, le cui disequazioni associate definiscono . Dunque
) La frontiera di sarà descritta dalle equazioni, le cui disequazioni associate definiscono . Dunque

Possiamo distinguere in due componenti:  , dove
, dove

e

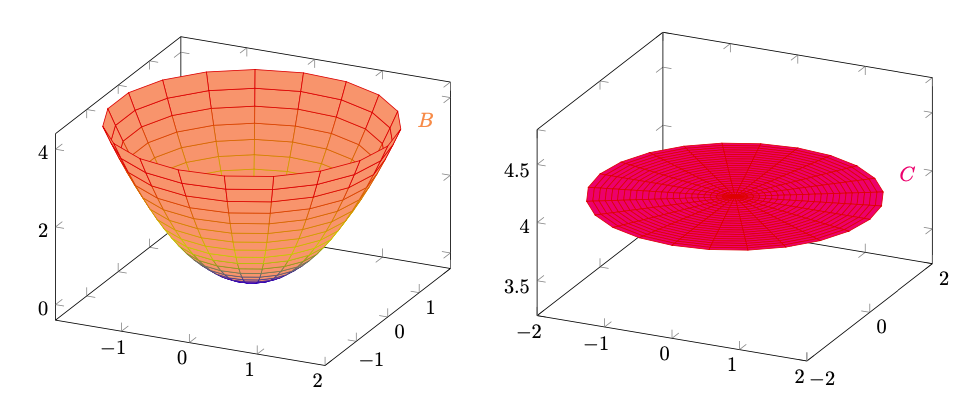
Figura 2: Gli insiemi  e
e  che compongono la frontiera di .
che compongono la frontiera di .
A questo punto, studiamo il comportamento di su e : dovremo trovare due parametrizzazioni  di e
di e  di e studiare massimi e minimi delle funzioni composte
di e studiare massimi e minimi delle funzioni composte  e
e  sui loro rispettivi domini.
sui loro rispettivi domini.
)
È immediato osservare che è unione di circonferenze di raggio  a quota
a quota  , per
, per ![z\in[0,4]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-dc21afa29aa7de968cc3bccf62ea7fe0_l3.svg "Rendered by QuickLaTeX.com") . Dunque, una sua possibile parametrizzazione è la seguente:
. Dunque, una sua possibile parametrizzazione è la seguente:
![\begin{equation*} \begin{array}{rcl} \varphi:[0,2\pi]\times[0,2]& \rightarrow&\mathbb{R}^3 \\ (\theta,\rho) & \mapsto&(\rho\cos\theta,\rho\sin\theta,\rho^2). \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a92b8ca64dc0edbb65ee3867cf3d0b1c_l3.svg "Rendered by QuickLaTeX.com")
Calcoliamo allora  :
:

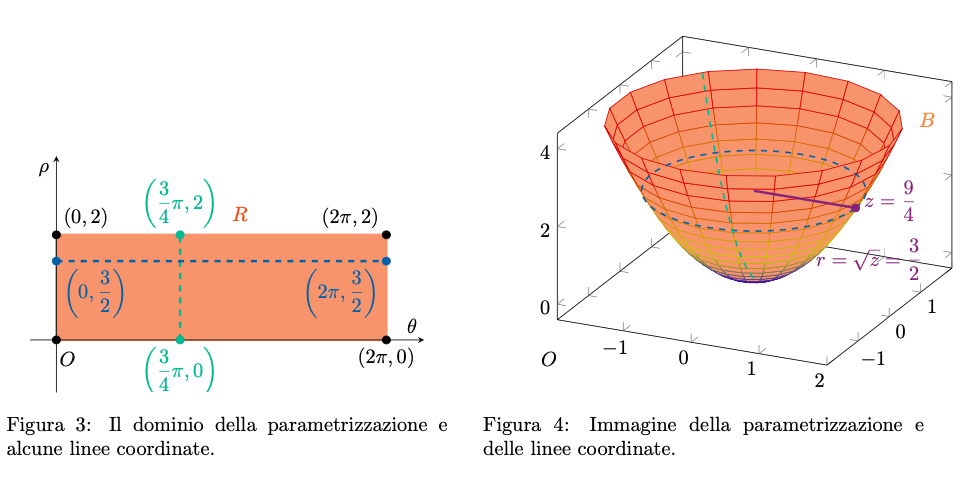
Sia ![R:=[0,2\pi]\times[0,2]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-bd207d2f174548d90db2adb38b8f42de_l3.svg "Rendered by QuickLaTeX.com") il dominio della parametrizzazione. Osserviamo che è somma e prodotto di funzioni continue e
il dominio della parametrizzazione. Osserviamo che è somma e prodotto di funzioni continue e  è un chiuso e limitato di
è un chiuso e limitato di  , dunque compatto. Per il teorema di Weierstrass, esisteranno il massimo ed il minimo di su . Per trovarli, distinguiamo nuovamente l’insieme nella sua parte interna,
, dunque compatto. Per il teorema di Weierstrass, esisteranno il massimo ed il minimo di su . Per trovarli, distinguiamo nuovamente l’insieme nella sua parte interna,  e la sua frontiera, formata dai 4 lati del rettangolo.
e la sua frontiera, formata dai 4 lati del rettangolo.
Per quanto riguarda l’insieme aperto  , essendo una funzione differenziabile, il teorema di Fermat afferma che condizione necessaria affinchè
, essendo una funzione differenziabile, il teorema di Fermat afferma che condizione necessaria affinchè  sia un punto di massimo o di minimo è che
sia un punto di massimo o di minimo è che  . Calcoliamo allora il gradiente di tramite le derivate parziali:
. Calcoliamo allora il gradiente di tramite le derivate parziali:
![\[\begin{cases} \dfrac{\partial (f\circ\varphi)}{\partial \theta}(\theta,\rho)=-4\rho\sin\theta+\rho\cos\theta\\\\ \dfrac{\partial (f\circ\varphi)}{\partial \rho}(\theta,\rho)=4\cos\theta+\sin\theta+4\rho^3. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-76119d54e732621b109ac69eebfa7173_l3.svg "Rendered by QuickLaTeX.com")
(1) 
Poichè  , la prima equazione si annulla solamente se
, la prima equazione si annulla solamente se  . Da tale relazione è possibile recuperare il valore di
. Da tale relazione è possibile recuperare il valore di  e
e  risolvendo il sistema
risolvendo il sistema

in cui  rappresenta e
rappresenta e  . Dunque si ha
. Dunque si ha

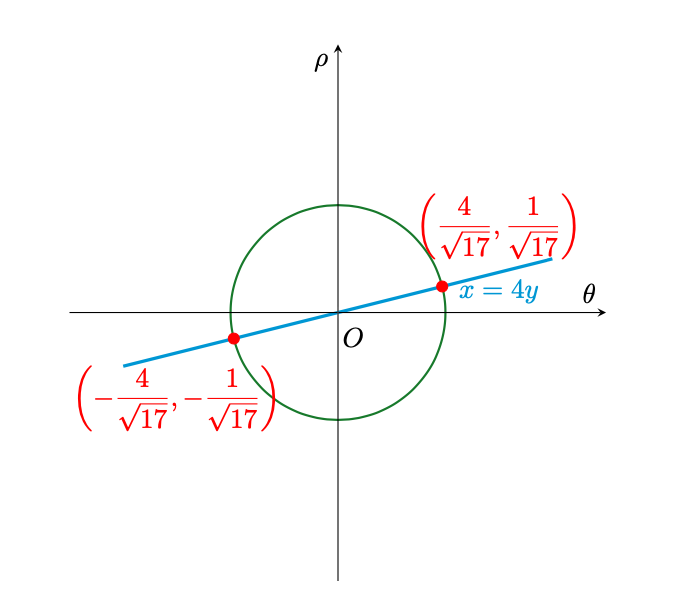
Figura 5: soluzioni dell’equazione lineare goniometrica.
Abbiamo dunque trovato che la prima equazione di (1) è verificata per  .
.
Inseriamo questi valori nella seconda equazione di (1) per trovare  :
:
![\begin{equation*} 4\rho^3\pm4\dfrac{4}{\sqrt{17}}\pm\dfrac{1}{\sqrt{17}}=0\Leftrightarrow4\rho^3\pm\dfrac{17}{\sqrt{17}}=0\Leftrightarrow\rho^3=\mp\dfrac{\sqrt{17}}{4}\Leftrightarrow\rho=\mp\sqrt[3]{\dfrac{\sqrt{17}}{4}} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-93f7e03f1828ab74572efdf707748dc0_l3.svg "Rendered by QuickLaTeX.com")
Possiamo accettare solo il valore ![\rho=+\sqrt[3]{\dfrac{\sqrt{17}}{4}}\approx 1\in(0,2)](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-0de73c383e3668df9df11cb39916458d_l3.svg "Rendered by QuickLaTeX.com") .
.
Abbiamo trovato dunque il punto critico di su
![\[\Tilde{P}_1=\left(\arccos{\left(-\dfrac{4}{\sqrt{17}}\right)},\sqrt[3]{\dfrac{\sqrt{17}}{4}}\right),\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-626f02f92b62821adb324917c7946a54_l3.svg "Rendered by QuickLaTeX.com")
a cui corrisponde il punto  su
su
![\begin{equation*} P_1=\varphi\left(\Tilde{P}_1\right)=\left(-\sqrt[3]{\dfrac{\sqrt{17}}{4}}\dfrac{4}{\sqrt{17}},-\sqrt[3]{\dfrac{\sqrt{17}}{4}}\dfrac{1}{\sqrt{17}},\sqrt[3]{\dfrac{17}{16}}\right)=\left(-\sqrt[3]{\dfrac{16}{17}},-\dfrac{1}{4}\sqrt[3]{\dfrac{16}{17}},\sqrt[3]{\dfrac{17}{16}}\right). \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a2b50c22dcb4c3889b0c29c8e6f7739c_l3.svg "Rendered by QuickLaTeX.com")
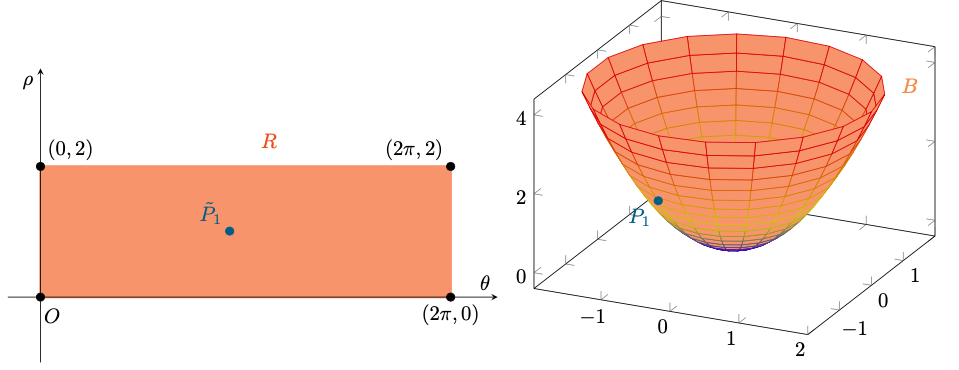
Figura 6: il punto critico  della funzione parametrizzata a cui corrisponde il punto su
della funzione parametrizzata a cui corrisponde il punto su  .
.
Per quanto riguarda la frontiera  , essa è composta dai
, essa è composta dai  lati
lati  e
e  , come mostrato in figura. Notiamo, tuttavia, che non è necessario studiare su
, come mostrato in figura. Notiamo, tuttavia, che non è necessario studiare su  e , i lati corrispondenti ai valori di
e , i lati corrispondenti ai valori di  ,
,  , poichè la funzione è
, poichè la funzione è  -periodica rispetto a
-periodica rispetto a  . Infatti, avremmo potuto parametrizzare tramite
. Infatti, avremmo potuto parametrizzare tramite ![\tilde{\varphi}:[-\pi,\pi]\times[0,2]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7c98aabc9e0e8a67e811e3587120049c_l3.svg "Rendered by QuickLaTeX.com") , con
, con  , laddove entrambe definite. In tal modo la parte di frontiera relativa a non avrebbe svolto alcun ruolo nella ricerca dei massimi e minimi di su . Lo stesso discorso vale analogamente per .
, laddove entrambe definite. In tal modo la parte di frontiera relativa a non avrebbe svolto alcun ruolo nella ricerca dei massimi e minimi di su . Lo stesso discorso vale analogamente per .
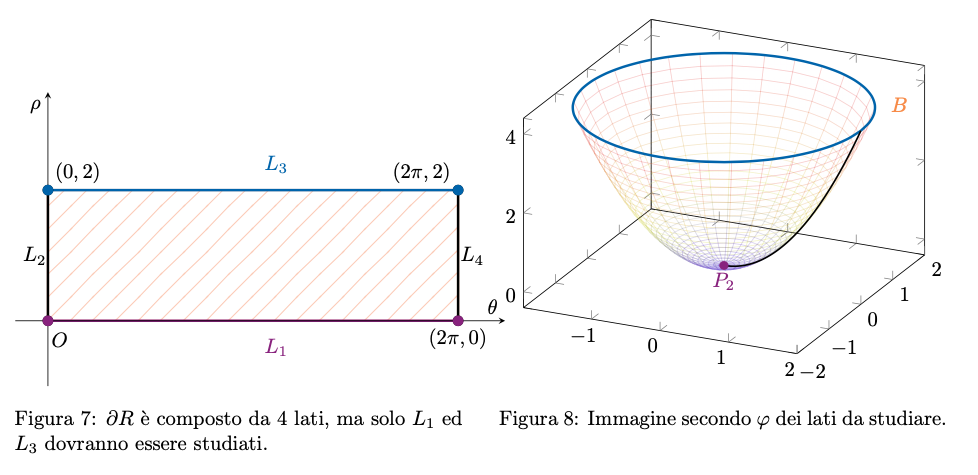
Il lato  , corrispondente al settore
, corrispondente al settore  viene parametrizzato da
viene parametrizzato da
![\begin{equation*} \begin{array}{rcl} \alpha_1:[0,2\pi] & \rightarrow&\mathbb{R}^2 \\ t&\mapsto&(t,0) \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a53fa112f9e3551d26f4808a3cb93e3c_l3.svg "Rendered by QuickLaTeX.com")
e

Ciò significa che è costante su ![L_1=[0,2\pi]\times\{0\}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-0ce9346be22120683aaaef060ce5d236_l3.svg "Rendered by QuickLaTeX.com") che risulta quindi un insieme di punti critici per , a cui corrisponde su il solo punto
che risulta quindi un insieme di punti critici per , a cui corrisponde su il solo punto  , che denotiamo con
, che denotiamo con  .
.
Per quanto riguarda ![L_3=[0,2\pi]\times\{2\}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1460a55b82c07295834b805e70660478_l3.svg "Rendered by QuickLaTeX.com") , parametrizzato da
, parametrizzato da
![\begin{equation*} \begin{array}{rcl} \alpha_3:[0,2\pi] & \rightarrow&\mathbb{R}^2 \\ t&\mapsto&(t,2). \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8db78afffdf7a5e441979440a2e27e55_l3.svg "Rendered by QuickLaTeX.com")
calcoliamo  e i suoi punti critici.
e i suoi punti critici.


Dunque i punti critici di  , ovvero i punti che annullano la sua derivata prima, sono i valori di
, ovvero i punti che annullano la sua derivata prima, sono i valori di ![t\in[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-60d5b1d3bd41f1cf9690f69a4982316a_l3.svg "Rendered by QuickLaTeX.com") per cui vale
per cui vale

equazione risolta in precedenza, dove abbiamo ottenuto i valori

Di tale successioni, solo ![t_0,t_1\in[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-fb27c9b64dc0d1b21cf69f84e6570168_l3.svg "Rendered by QuickLaTeX.com") , dominio della parametrizzazione. I punti su corrispondenti a
, dominio della parametrizzazione. I punti su corrispondenti a  e
e  sono rispettivamente
sono rispettivamente  e
e  definiti da
definiti da

e

a cui corrispondono a loro volta i punti su

e

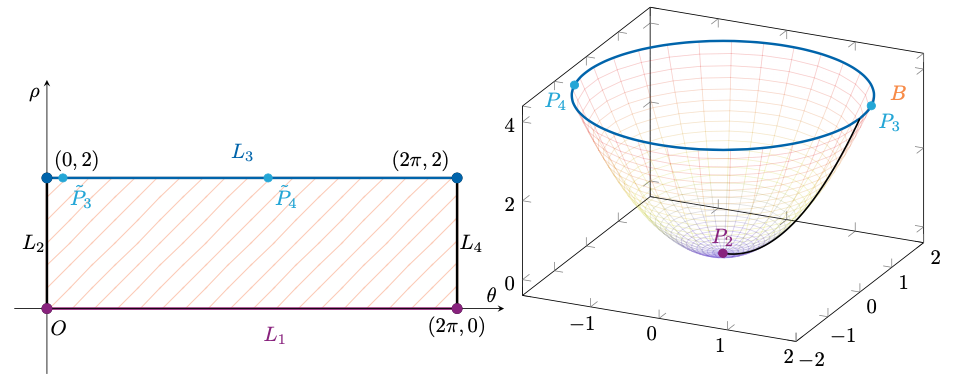
Figura 9: rappresentazione dei punti interessanti trovati su e la loro immagine su .
Questo conclude lo studio di su che ha portato alla nostra attenzione candidati ad essere punti di massimo o di minimo di su : i punti  e
e  .
.
) Osserviamo immediatamente che è un cerchio di raggio  a quota
a quota  . Pertanto esso è parametrizzabile da
. Pertanto esso è parametrizzabile da
![\begin{equation*} \begin{array}{rcl} \psi:R=[0,2\pi]\times[0,2] & \rightarrow&\mathbb{R}^3 \\ (\theta,\rho) & \mapsto&(\rho\cos\theta,\rho\sin\theta,4). \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7d3270488c2fcaa0a2b55cc9125d34e1_l3.svg "Rendered by QuickLaTeX.com")
Figura 10: parametrizzazione di . Vengono rappresentate alcune linee coordinate per aiutare la visualizzazione della mappa .
Calcoliamo

Analogamente a quanto detto in precedenza, anche per il teorema di Weierstrass garantisce l’esistenza del massimo e del minimo su . Studiamo inizialmente il comportamento di sull’insieme aperto tramite la ricerca dei punti critici, per poi studiare su .
Calcoliamo le derivate parziali di :
![\[\begin{cases} \dfrac{\partial (f\circ\psi)}{\partial \theta}(\theta,\rho)=-4\rho\sin\theta+\rho\cos\theta\\\\ \dfrac{\partial (f\circ\psi)}{\partial \rho}(\theta,\rho)=4\cos\theta+\sin\theta. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ba72ba66da2eb050c0b51ddc0fe6077c_l3.svg "Rendered by QuickLaTeX.com")
Dunque
(2) 
Se  ,
,  e il precedente sistema è equivalente a
e il precedente sistema è equivalente a

che non ammette soluzioni: ciò significa che non ci sono punti critici di su .
Potevamo giungere a questa conclusione osservando che la restrizione di a è affine, dunque non può ammettere punti critici.
Per quanto riguarda , poichè anche è -periodica rispetto a , lo stesso discorso fatto in precedenza ci autorizza ad ignorare i lati corrispondenti ai valori e . I lati rimasti sono ![M_1=[0,2\pi]\times\{0\}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-3d788b9973bfe659c9b7d28a46f97ec8_l3.svg "Rendered by QuickLaTeX.com") e
e ![M_3=[0,2\pi]\times\{2\}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-74ca8a07467df40f20e2874139a0767d_l3.svg "Rendered by QuickLaTeX.com") . Osserviamo tuttavia che
. Osserviamo tuttavia che  , dunque anziché parametrizzare il lato
, dunque anziché parametrizzare il lato  e studiare attraverso tale parametrizzazione, a mio avviso è più rapido annettere il punto
e studiare attraverso tale parametrizzazione, a mio avviso è più rapido annettere il punto  tra i possibili candidati e semplicemente valutare
tra i possibili candidati e semplicemente valutare  .
.
Infine, per quanto riguarda  , osserviamo che
, osserviamo che  , che abbiamo ampiamente studiato in precedenza.
, che abbiamo ampiamente studiato in precedenza.
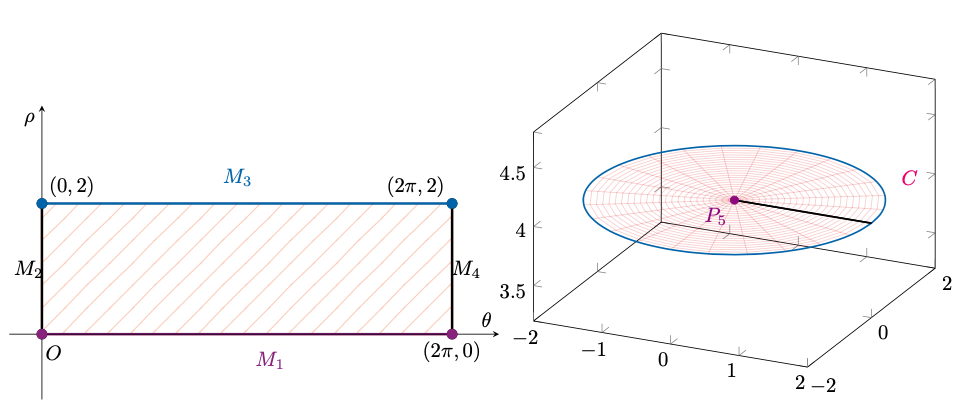
Figura 11: immagine di attraverso . Come si evince, non vi è nulla di speciale in  rappresentati in nero.
rappresentati in nero.
Questo conclude lo studio di .
I possibili candidati ad essere punti di massimo o di minimo di su sono i seguenti
![\begin{equation*} \begin{split} &P_1=\left(-\sqrt[3]{\dfrac{16}{17}},-\dfrac{1}{4}\sqrt[3]{\dfrac{16}{17}},\sqrt[3]{\dfrac{17}{16}}\right),\qquad P_2=(0,0,0),\qquad P_3=\left(\dfrac{8}{\sqrt{17}},\dfrac{2}{\sqrt{17}},4\right),\\ & P_4=\left(-\dfrac{8}{\sqrt{17}},-\dfrac{2}{\sqrt{17}},4\right),\qquad P_5=(0,0,4), \end{split} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2cfe9bd7a0d7b297eb268811c42aba7a_l3.svg "Rendered by QuickLaTeX.com")
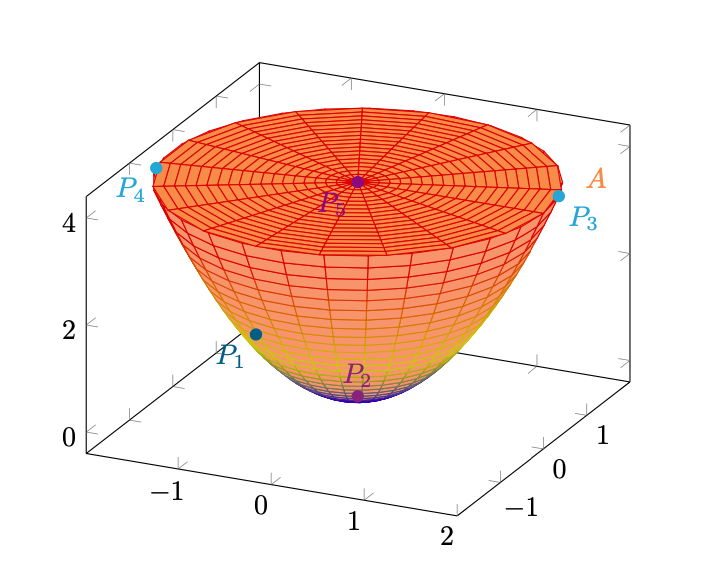
Figura 12: tutti i possibili candidati ad essere punti di massimo o minimo di su .
i cui valori rispetto a sono

ha massimo su pari a  , assunto nel punto
, assunto nel punto  e valore minimo
e valore minimo  , assunto in
, assunto in ![P_1=\left(-\sqrt[3]{\dfrac{16}{17}},-\dfrac{1}{4}\sqrt[3]{\dfrac{16}{17}},\sqrt[3]{\dfrac{17}{16}}\right)](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b5cb8047744b1285ab7ec5cc0e26a8dc_l3.svg "Rendered by QuickLaTeX.com") .
.
Svolgimento 2.
, questa volta utilizzando il metodo dei moltiplicatori di Lagrange, anziché passare attraverso la parametrizzazione.
Possiamo separare la frontiera di in questo modo:

dove


e

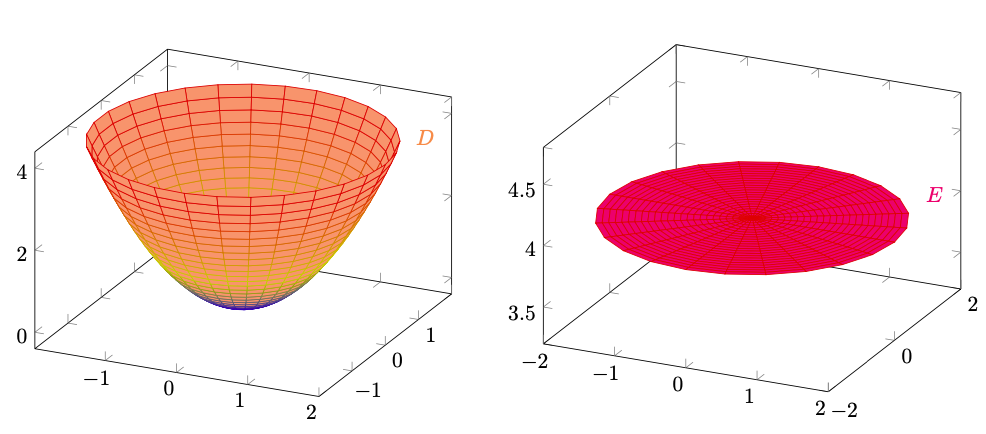
Figura 13: gli insiemi ,  ed
ed  , che compongono .
, che compongono .
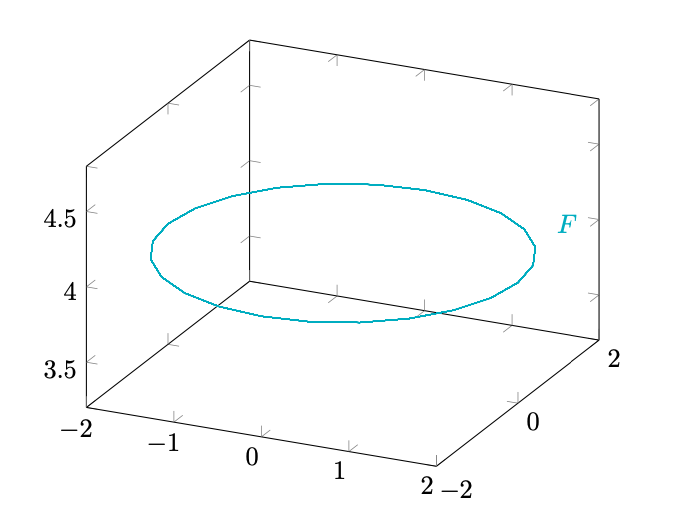
Figura 14: si nota che  .
.
Sarà quindi necessario costruire tre Lagrangiane,  ,
,  e
e  , per ciascun vincolo.
, per ciascun vincolo.
 Consideriamo la funzione
Consideriamo la funzione

e restringiamola al cilindro aperto  . Notiamo che
. Notiamo che  . Abbiamo cioè espresso il vincolo come luogo di zeri della funzione
. Abbiamo cioè espresso il vincolo come luogo di zeri della funzione  . A questo punto possiamo costruire la Lagrangiana
. A questo punto possiamo costruire la Lagrangiana

Troviamo i punti critici della Lagrangiana, secondo il teorema dei moltiplicatori di Lagrange:

Le prime due equazioni impongono la relazione  e, considerato che
e, considerato che  , l’ultima equazione diventa
, l’ultima equazione diventa
![\begin{equation*} x^2+\dfrac{x^2}{16}=-\dfrac{1}{x}\Leftrightarrow \dfrac{17}{16}x^3=-1\Leftrightarrow x=-\sqrt[3]{\dfrac{16}{17}}. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-080162bfc442fab7f430ac513b76e5db_l3.svg "Rendered by QuickLaTeX.com")
Recuperiamo i valori delle altre coordinate:
![\begin{equation*} y=\dfrac{-\sqrt[3]{\dfrac{16}{17}}}{4}=-\dfrac{1}{4}\sqrt[3]{\dfrac{16}{17}},\qquad z=-\dfrac{1}{-\sqrt[3]{\dfrac{16}{17}}}=\sqrt[3]{\dfrac{17}{16}}. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b117df627caaeb4980f89c0b12257d72_l3.svg "Rendered by QuickLaTeX.com")
Abbiamo quindi trovato il punto critico ![P_1=\left(-\sqrt[3]{\dfrac{16}{17}},-\dfrac{1}{4}\sqrt[3]{\dfrac{16}{17}},\sqrt[3]{\dfrac{17}{16}}\right)\in D](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8cc9cbefe45942e6e9cb4a9d863d5d3f_l3.svg "Rendered by QuickLaTeX.com") . Osserviamo anche che
. Osserviamo anche che
![\[\nabla g(P_1)=\left(-2\sqrt[3]{\dfrac{16}{17}},-2\dfrac{1}{4}\sqrt[3]{\dfrac{16}{17}},-1\right)\neq(0,0,0).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8ee307bc30f928f55d2a237dcbcc2720_l3.svg "Rendered by QuickLaTeX.com")
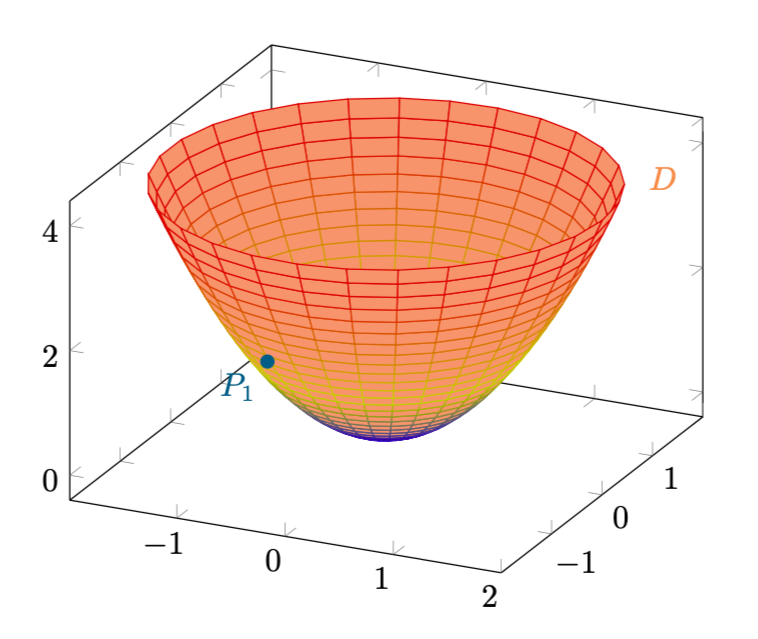
Figura 15: l’unico punto critico su .
 Ricordando che
Ricordando che  , possiamo esprimere come luogo di zero della funzione
, possiamo esprimere come luogo di zero della funzione  , definita semplicemente
, definita semplicemente  . Ripetendo i passi del punto precedente, calcoliamo la Lagrangiana e i suoi punti critici.
. Ripetendo i passi del punto precedente, calcoliamo la Lagrangiana e i suoi punti critici.


Il sistema è evidentemente impossibile.
Rimane da studiare il vincolo unidimensionale , ottenuto come intersezione tra (la chiusura de) i due vincoli ed .
Applichiamo 2 sfruttando le funzioni che definivano i precedenti vincoli: e  . Vale infatti
. Vale infatti

Seguendo l’enunciato, costruiamo la Lagrangiana 

ed, infine, i suoi punti critici:

Confrontando le prime due equazioni troviamo la relazione  . Utilizzandola nella quarta equazione si ricava
. Utilizzandola nella quarta equazione si ricava

Ricaviamo anche le altre coordinate:

Abbiamo quindi trovato altri due punti critici:  e
e  . Infine, per accettare i punti trovati, dobbiamo verificare che i gradienti delle funzioni definenti i vincoli non siano linearmente dipendenti in quei punti. Vale
. Infine, per accettare i punti trovati, dobbiamo verificare che i gradienti delle funzioni definenti i vincoli non siano linearmente dipendenti in quei punti. Vale


I gradienti delle funzioni non sono linearmente dipendenti nè in nè in  , che quindi possono essere accettati.
, che quindi possono essere accettati.
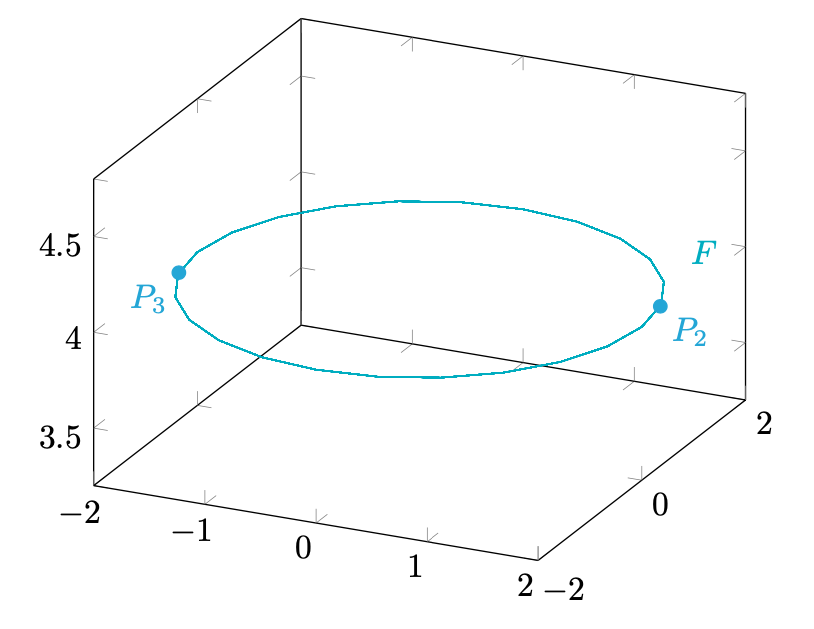
Figura 16: i due punti critici su .
Abbiamo trovato  candidati ad essere massimo e minimo di su :
candidati ad essere massimo e minimo di su :
![\begin{equation*} P_1=\left(-\sqrt[3]{\dfrac{16}{17}},-\dfrac{1}{4}\sqrt[3]{\dfrac{16}{17}},\sqrt[3]{\dfrac{17}{16}}\right),\qquad P_2=\left(\dfrac{8}{\sqrt{17}},\dfrac{2}{\sqrt{17}},4\right),\qquad P_3=\left(-\dfrac{8}{\sqrt{17}},-\dfrac{2}{\sqrt{17}},4\right). \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-dc3f835dc02f7dd7d01413e1d01644ce_l3.svg "Rendered by QuickLaTeX.com")
Calcoliamo il valore di su ciascuno di essi e confrontiamoli.
![\begin{equation*} \begin{gathered} f(P_1)=f\left(-\sqrt[3]{\dfrac{16}{17}},-\dfrac{1}{4}\sqrt[3]{\dfrac{16}{17}},\sqrt[3]{\dfrac{17}{16}}\right)=-\dfrac{3}{4}\left(\dfrac{17}{2}\right)^{\dfrac{2}{3}}, \\ f(P_2)=f\left(\dfrac{8}{\sqrt{17}},\dfrac{2}{\sqrt{17}},4\right)=16+2\sqrt{17},\\ f(P_3)=f\left(-\dfrac{8}{\sqrt{17}},-\dfrac{2}{\sqrt{17}},4\right)=16-2\sqrt{17}. \end{gathered} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4b3a80114b65fe908c5b91a227fe0a1d_l3.svg "Rendered by QuickLaTeX.com")
ha massimo su pari a , assunto nel punto e valore minimo  , assunto in .
. Data la funzione definita da
, assunto in .
. Data la funzione definita da
![\[f(x,y,z):=xy^2z,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f55c50526b83ff93b29d96bcdbe8321c_l3.svg "Rendered by QuickLaTeX.com")
determinare, se esistono, il massimo e il minimo di sull’insieme
![\[A:=\left\{(x,y,z)\in\mathbb{R}^3\mid x+z=0, \ \dfrac{x^2}{4}+\dfrac{y^2}{9}+z^2=1\right\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-312359e7ff2edfba241ee41d1dfbdf99_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento 1.
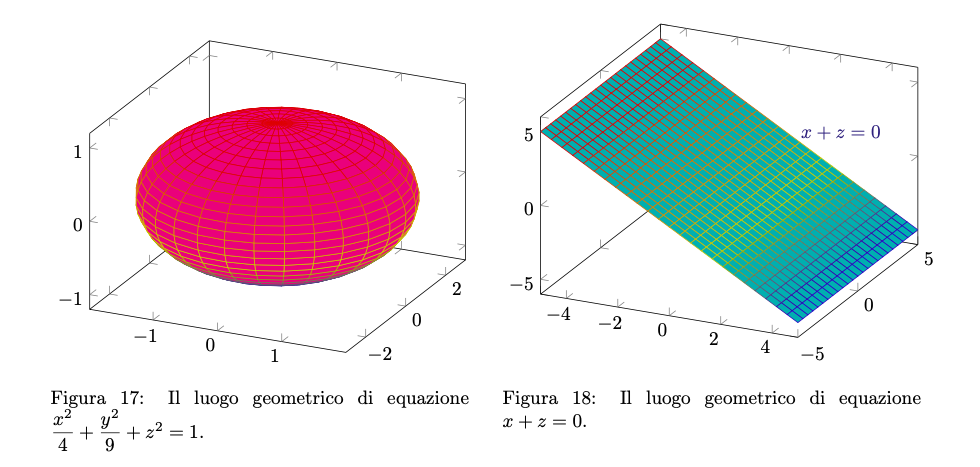
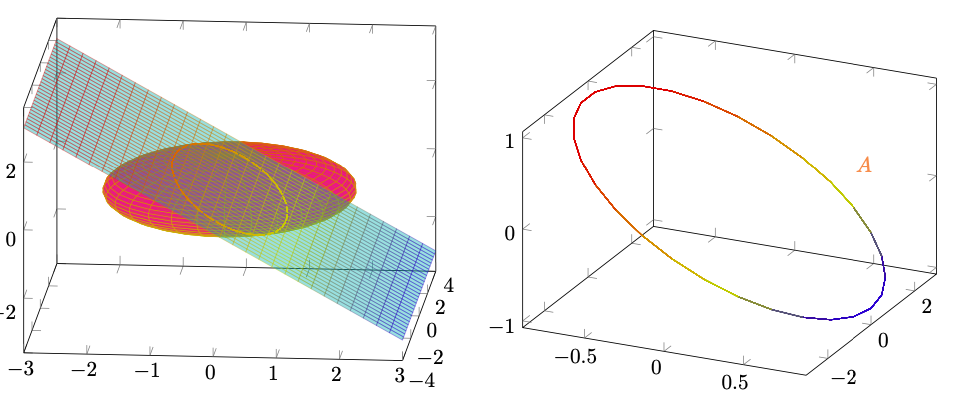
Figura 19: l’insieme , intersezione delle superfici precedenti.
Osserviamo che è un monomio, pertanto è una funzione continua su , mentre l’insieme è chiuso e limitato. La chiusura segue dal fatto che è intersezione di controimmagini di insiemi chiusi di tramite funzioni continue, mentre per la limitatezza notiamo che esso è intersezione tra un piano e un’ellissoide, quest’ultimo fornisce la limitatezza ad . Dunque è un chiuso e limitato di , compatto per il teorema di Heine-Borel. Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
Osserviamo anche che  , ovvero
, ovvero  : l’intero problema, si riduce quindi a studiare il massimo ed il minimo di attraverso i metodi che abbiamo solitamente utilizzato per studiare la frontiera di .
: l’intero problema, si riduce quindi a studiare il massimo ed il minimo di attraverso i metodi che abbiamo solitamente utilizzato per studiare la frontiera di .
Come detto, è intersezione tra il piano  e l’ellissoide
e l’ellissoide  . Cerchiamo una parametrizzazione di questa curva, mettendo a sistema le due equazioni.
. Cerchiamo una parametrizzazione di questa curva, mettendo a sistema le due equazioni.

Possiamo riconoscere che la seconda equazione descrive un’ellisse di semiassi  e , la cui parametrizzazione è
e , la cui parametrizzazione è
![\begin{equation*} \begin{array}{rcl} \alpha:[0,2\pi]& \rightarrow&\mathbb{R}^2 \\ t & \mapsto&\left(\dfrac{2}{\sqrt{5}}\cos t,3\sin t\right). \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e08b6a54354b16de034de0ec32c60120_l3.svg "Rendered by QuickLaTeX.com")
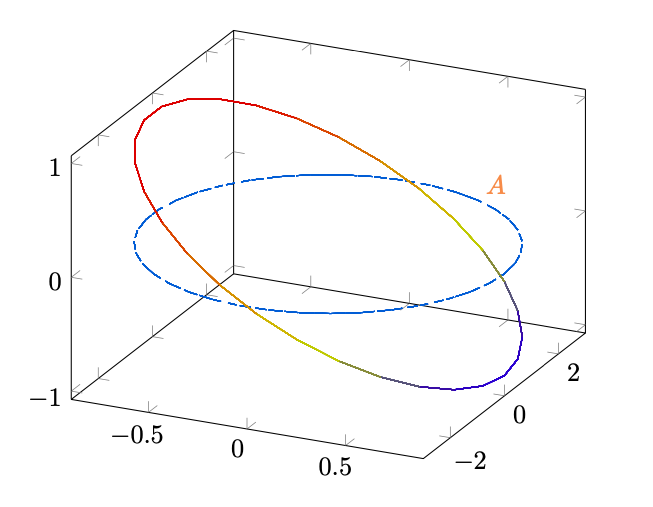
Figura 20: tratteggiata in blu la proiezione di sul piano  .
.
Essa è la proiezione su di , che invece vive in , più precisamente nel piano . Ecco dunque che una parametrizzazione di è la seguente:
![\begin{equation*} \begin{array}{rcl} \beta:[0,2\pi] & \rightarrow&\mathbb{R}^3 \\ t & \mapsto&\left(\dfrac{2}{\sqrt{5}}\cos t,3\sin t,-\dfrac{2}{\sqrt{5}}\cos t\right) \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8cec4fe0ff8fbec10019a0d4339ad2ae_l3.svg "Rendered by QuickLaTeX.com")
A questo punto, esplicitiamo  e studiamo il suo massimo e minimo su
e studiamo il suo massimo e minimo su ![[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ffb229e5260cf9d342ad47e70e13b657_l3.svg "Rendered by QuickLaTeX.com") . Essendo composizione di funzioni continue e l’intervallo compatto, il teorema di Weierstrass garantisce nuovamente il massimo ed il minimo di su .
. Essendo composizione di funzioni continue e l’intervallo compatto, il teorema di Weierstrass garantisce nuovamente il massimo ed il minimo di su .
Calcoliamo dunque :

Seguendo le indicazioni del teorema di Fermat, i possibili punti di massimo e di minimo vanno ricercati tra i punti critici di nella parte interna del dominio della parametrizzazione, tra gli eventuali punti di non derivabilità e tra gli estremi  e
e  . Essendo derivabile, non vi sono punti di non derivabilità. Cerchiamo allora i punti critici, ovvero i valori
. Essendo derivabile, non vi sono punti di non derivabilità. Cerchiamo allora i punti critici, ovvero i valori  tali per cui accade
tali per cui accade  .
.

I valori di  per cui ciò accade sono
per cui ciò accade sono  , con
, con  , ovvero
, ovvero

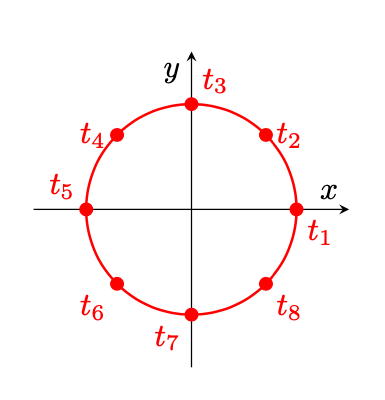
Figura 21: istanti corrispondenti a punti critici della mappa , la rilettura di su .
Nonostante  , avremo comunque dovuto considerarlo tra gli estremi del dominio, assieme a
, avremo comunque dovuto considerarlo tra gli estremi del dominio, assieme a  . A questi istanti , corrispondono i punti
. A questi istanti , corrispondono i punti  su :
su :

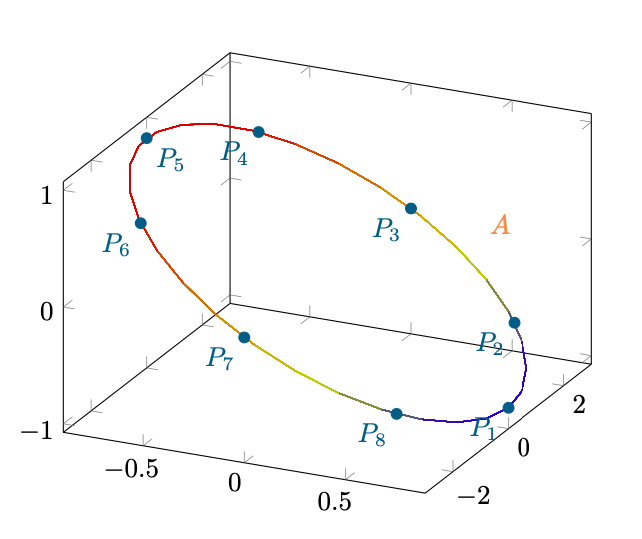
Figura 22: rappresentazione di tutti i candidati ad essere punti di massimo o minimo di su .
Abbiamo trovato 8 candidati ad essere massimo e minimo di su . Calcoliamo il loro valore attraverso e confrontiamoli.

ha massimo su pari a  , assunto nei punti
, assunto nei punti  ,
,  ,
,  e
e  e valore minimo
e valore minimo  , assunto in
, assunto in  ,
,  ,
,  e
e  .
.
Svolgimento 2.
come vincolo, il quale può essere espresso come intersezione di due vincoli:  , dove
, dove  è il piano
è il piano

mentre  è l’ellissoide
è l’ellissoide

Osserviamo che  e
e  , dove
, dove  e
e  .
.
Il teorema dei moltiplicatori di Lagrange, declinato in questo contesto, afferma che, in corrispondenza dei punti di massimo e di minimo relativi di su succede un fenomeno che possiamo rileggere sia in chiave geometrica che algebrica: geometricamente lo si può interpretare dal fatto che i gradienti di , ed sono complanari. Da un punto di vista algebrico, detto  un punto di estremo relativo, esisteranno
un punto di estremo relativo, esisteranno  tali che
tali che

Per questo motivo, costruiamo la Lagrangiana  , definita tramite
, definita tramite

Il teorema dei moltiplicatori di Lagrange garantisce che i punti critici di  corrisponderanno esattamente agli estremi relativi di su . Calcoliamo la Lagrangiana:
corrisponderanno esattamente agli estremi relativi di su . Calcoliamo la Lagrangiana:

Andiamo a cercare i suoi punti critici, risolvendo con attenzione il seguente sistema

Dalla quarta equazione troviamo la relazione da utilizzare in ciascuna delle altre equazioni:

La seconda equazione si annulla se  oppure se
oppure se  . Supponiamo inizialmente , l’ultima equazione diventa
. Supponiamo inizialmente , l’ultima equazione diventa

e, ricordando che , troviamo  . Abbiamo, al momento, trovato due punti critici:
. Abbiamo, al momento, trovato due punti critici:

A questo punto, possiamo supporre  e dunque assumere . Inseriamo questa informazione nel sistema, dopo aver sostituito la prima equazione con la somma tra di essa e la terza equazione:
e dunque assumere . Inseriamo questa informazione nel sistema, dopo aver sostituito la prima equazione con la somma tra di essa e la terza equazione:

Dalla prima equazione risulta

che, inserito nella terza equazione, dà

Quest’ultima equazione è soddisfatta se  , oppure se
, oppure se  , cioè
, cioè  . Ricaviamo velocemente le soluzioni derivanti da : l’ultima equazione risulta
. Ricaviamo velocemente le soluzioni derivanti da : l’ultima equazione risulta

Poiche  , abbiamo trovato altri due punti critici:
, abbiamo trovato altri due punti critici:

Infine, indipendentemente dal segno che sussiste nella relazione tra  ed
ed  , inseriamo nell’ultima equazione per ricavare le ultime soluzioni del sistema:
, inseriamo nell’ultima equazione per ricavare le ultime soluzioni del sistema:

Ricaviamo le altre coordinate attraverso le precedenti relazioni, facendo attenzione a tutte le possibili combinazioni di segni: poichè

inoltre, da ,


Abbiamo quindi trovato altri quattro punti critici:

Abbiamo trovato 8 candidati ad essere massimo e minimo di su .
Mettiamo in evidenza una sostanziale differenza che sussiste tra i primi quattro candidati e gli altri. I punti , , e sono in realtà punti critici di che si trovano su . Il teorema dei moltiplicatori di Lagrange rileva banalmente anche gli stessi punti critici di 1 appartenenti al vincolo, poiché il vettore nullo è complanare ad ogni coppia di vettori: basta prendere  per ottenere la combinazione lineare banale
per ottenere la combinazione lineare banale
![\[0=\nabla f(x,y,z)=0\nabla g(x,y,z)-0\nabla h(x,y,z).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-3d93e92a3ed8fa520dd0bc027a1e6a59_l3.svg "Rendered by QuickLaTeX.com")
I punti  ,
,  ,
,  e
e  sono conclusioni non banali del teorema dei moltiplicatori di Lagrange. Dimostriamo esplicitamente che in tali punti il gradiente di è complanare con quello di ed , ovvero che esiste una combinazione lineare (non nulla) di
sono conclusioni non banali del teorema dei moltiplicatori di Lagrange. Dimostriamo esplicitamente che in tali punti il gradiente di è complanare con quello di ed , ovvero che esiste una combinazione lineare (non nulla) di  e
e  che ricava
che ricava  . Iniziamo da :
. Iniziamo da :

A questo punto dovremo trovare tali che  . Osserviamo che essendo vettori in , si tratta di un sistema con tre equazioni e due incognite, ovvero un sistema sovradeterminato. Sarà proprio il fatto che è soluzione del teorema di Lagrange a rendere risolvibile il sistema risolvibile.
. Osserviamo che essendo vettori in , si tratta di un sistema con tre equazioni e due incognite, ovvero un sistema sovradeterminato. Sarà proprio il fatto che è soluzione del teorema di Lagrange a rendere risolvibile il sistema risolvibile.
Dobbiamo dunque trovare tali che

Dalla seconda equazione troviamo subito  . Inseriamo il valore di
. Inseriamo il valore di  nella prima equazione per calcolare
nella prima equazione per calcolare  :
:

A questo punto vediamo se la terza equazione è soddisfatta. Ciò implicherebbe la complanarità dei tre vettori gradienti in :

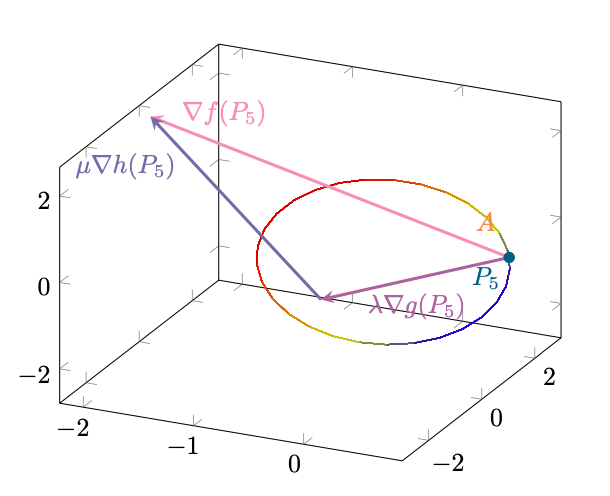
Figura 23: illustrazione della complanarità dei gradienti di , e in . La stessa situazione si verifica per , e .
La complanarità dei punti , e si dimostra in modo del tutto analogo.
Giunti a questo punto, non ci resta che calcolare il valore attraverso degli otto candidati e confrontarli.

ha massimo su pari a , assunto nei punti  ,
,  , e
, e  e valore minimo , assunto in
e valore minimo , assunto in  ,
,  ,
,  e
e  .
.
- Tra le ipotesi del teorema dei moltiplicatori di Lagrange vi è che il punto in questione non dev’essere punto critico delle funzioni definenti i vincoli, ma non vi è alcuna ipotesi riguardo il gradiente della funzione di cui si sta calcolando massimo e minimo. Al contrario, ogni suo punto critico soddisfaciente l’equazione del vincolo sarà in particolare punto critico della Lagrangiana con moltiplicatori nulli. ↩
 . Data la funzione definita da
. Data la funzione definita da
![\[f(x,y,z):=x^2+y^2+y(z+x-1),\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7061bb78df1164fb92eeb8efe11abf28_l3.svg "Rendered by QuickLaTeX.com")
determinare, se esistono, il massimo e il minimo di sull’insieme
![\[A:=\left\{(x,y,z)\in\mathbb{R}^3\mid x+y+z=0, \ x^2+y^2=1\right\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ee4f8ee595a55da6242dc4af7ade1521_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento 1.
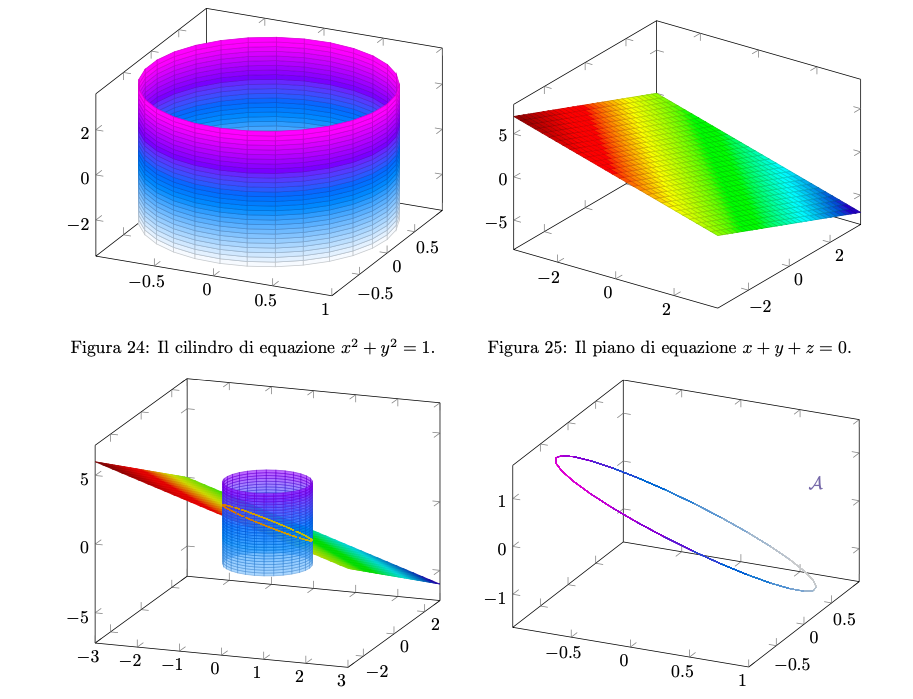
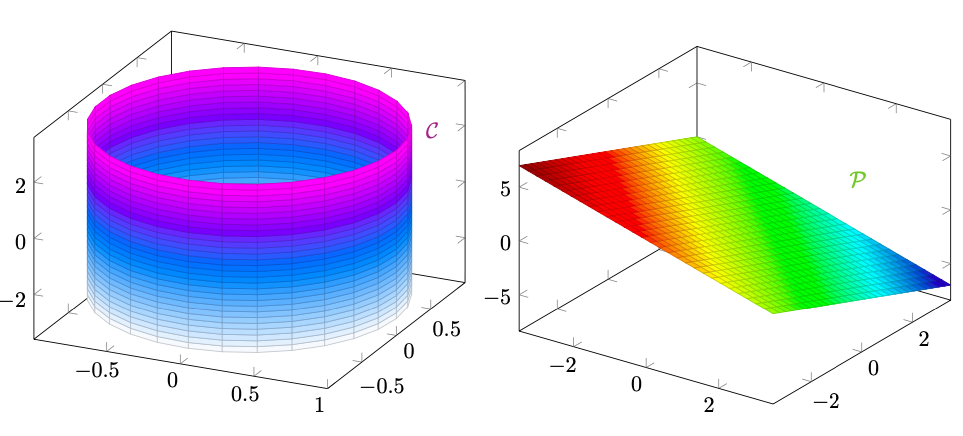
Figura 26: è l’ellisse intersezione tra il cilindro e il piano.
Osserviamo che è un polinomio, pertanto è una funzione continua su , mentre l’insieme è chiuso e limitato. La chiusura segue dal fatto che è intersezione di controimmagini di insiemi chiusi di tramite funzioni continue, mentre per la limitatezza dimostriamo che esso è contenuto in una palla di raggio  . Sia infatti qualsiasi, stimiamo il quadrato della sua norma:
. Sia infatti qualsiasi, stimiamo il quadrato della sua norma:

dove abbiamo sfruttato il fatto che su vale  .
.
L’altra relazione definente implica  , che inserita nella precedente equazione ci dà
, che inserita nella precedente equazione ci dà

Ora non ci resta che valutare il contributo di  su . Possiamo parametrizzare la proiezione
su . Possiamo parametrizzare la proiezione  di sul piano
di sul piano  mediante
mediante
![\begin{equation*} \gamma(t):=(\cos t,\sin t), \qquad t\in[0,2\pi], \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1ff7229b4ba22c24e9354c2093edf625_l3.svg "Rendered by QuickLaTeX.com")
dunque stimare su studiando  su :
su :


Su ciascuno di questi valori  osserviamo che
osserviamo che  . Ciò significa che
. Ciò significa che  . Tale informazione può essere utilizzata per stimare definitivamente la norma di :
. Tale informazione può essere utilizzata per stimare definitivamente la norma di :

e questo conclude la dimostrazione del fatto che è un insieme limitato, contenuto in una sfera di raggio .
Per il teorema di Heine-Borel è un insieme compatto di . Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
Notiamo che , cioè coincide con la sua frontiera. Utilizziamo il teorema dei moltiplicatori di Lagrange, osservando che è intersezione di due vincoli:  , dove
, dove  è il cilindro
è il cilindro

e è il piano di equazione  .
.
Esprimiamo i vincoli come luoghi di zeri di funzioni per applicare il metodo dei moltiplicatori:

con

e

con

Il teorema dei moltiplicatori di Lagrange, declinato in questo contesto, afferma che, in corrispondenza dei punti di massimo e di minimo relativi di su succede un fenomeno che possiamo rileggere sia in chiave geometrica che algebrica: geometricamente lo si può interpretare dal fatto che i gradienti di , ed sono complanari. Da un punto di vista algebrico, detto un punto di estremo relativo, esisteranno tali che
Per questo motivo, costruiamo la Lagrangiana , definita tramite
Il teorema dei moltiplicatori di Lagrange garantisce che i punti critici di corrisponderanno esattamente agli estremi relativi di su . Infatti, calcolare i punti critici di significa risolvere il sistema

Le prime tre equazioni affermano proprio che appartiene al piano individuato da e . Le ultime equazioni assicurano che il punto si trovi su  .
.
Calcoliamo la Lagrangiana:

Andiamo a cercare i suoi punti critici, risolvendo con attenzione il seguente sistema

La terza equazione impone immediatamente  , che sostituiamo laddove è utile:
, che sostituiamo laddove è utile:

Confrontando l’ultima equazione con la seconda, possiamo riscrivere il sistema in questo modo:

A questo punto, osserviamo la prima equazione: essa è soddisfatta solamente se oppure se  . Se supponiamo , il sistema si risolve immediatamente
. Se supponiamo , il sistema si risolve immediatamente

Abbiamo quindi trovato i primi due punti critici della Lagrangiana:
![\[P_1=(0,1,-1)\qquad \text{e}\qquad P_2=(0,-1,1).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-092f974ef64d97514d44bd6d685533a7_l3.svg "Rendered by QuickLaTeX.com")
Supponiamo invece  , da cui risulta
, da cui risulta

Abbiamo trovato altri due punti critici, ovvero

Abbiamo trovato quattro candidati ad essere punti di massimo e di minimo di su .
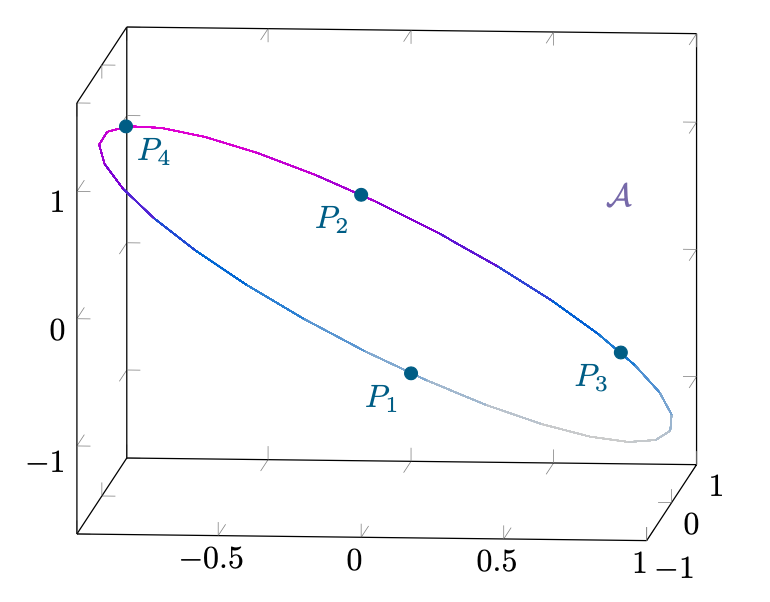
Figura 27: tutti i candidati ad essere punti di massimo e di minimo di su .
Calcoliamo i loro valori tramite e confrontiamoli:

ha massimo su pari a  , assunto nei punti
, assunto nei punti  e
e  e valore minimo
e valore minimo  , assunto in
, assunto in  .
.
Svolgimento 2.

la funzione diventa
![\begin{equation*} f(x,y,z)=x^2+y^2+y(z+x+y-y-1)=1+y(-y-1)=-y^2-y+1,\qquad\text{con }y\in[-1,1]. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a26cd2099298ae74bf66d49e59bb069b_l3.svg "Rendered by QuickLaTeX.com")
L’espressione della funzione si semplifica estremamente, risultando funzione della sola variabile . Definiamo (con abuso di notazione) la funzione di una singola variabile
![\begin{equation*} \begin{array}{rcl} f:[-1,1]\subset\mathbb{R} & \rightarrow&\mathbb{R} \\ y & \mapsto&-y^2-y+1 \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-edc6101287eecf6413d89fac330082ef_l3.svg "Rendered by QuickLaTeX.com")
Possiamo pertanto studiare il massimo ed il minimo di sull’intervallo ![[-1,1]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-35a2f14904b1a3453db3ce57532154de_l3.svg "Rendered by QuickLaTeX.com") . Tale problema ha sicuramente soluzione, grazie al teorema di Weierstrass, essendo continua e compatto. Una volta trovati i valori di basterà trovare i punti corrispondenti appartenenti al vincolo.
. Tale problema ha sicuramente soluzione, grazie al teorema di Weierstrass, essendo continua e compatto. Una volta trovati i valori di basterà trovare i punti corrispondenti appartenenti al vincolo.
A tal fine, essendo anche differenziabile, il teorema di Fermat ci fornisce uno strumento per riconoscere eventuali punti di massimo o minimo di per quanto riguarda l’insieme aperto ![(-1,1)=[-1,1]^\circ](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-68e099dffd63a8bf8a7f6fd187dee3f8_l3.svg "Rendered by QuickLaTeX.com") : tali punti, saranno in particolare punti critici di . Nulla possiamo invece dire su
: tali punti, saranno in particolare punti critici di . Nulla possiamo invece dire su ![\partial[-1,1]=\{-1\}\cup\{1\}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-083b2b8f57cfd632c8cfb6afb13d43b7_l3.svg "Rendered by QuickLaTeX.com") : questi due valori andranno studiati separatamente.
: questi due valori andranno studiati separatamente.
Come indicato dal teorema di Fermat, studiamo i punti critici di , ovvero i valori  tali che
tali che  :
:

Abbiamo dunque trovato il valore  , a cui corrispondono i punti soluzione del sistema precedente, con :
, a cui corrispondono i punti soluzione del sistema precedente, con :

Abbiamo quindi trovato due candidati:

Dobbiamo aggiungere manualmente i punti corrispondenti agli estremi  , poiché non abbiamo alcun motivo per escluderli. Risolviamo nuovamente il sistema con :
, poiché non abbiamo alcun motivo per escluderli. Risolviamo nuovamente il sistema con :

Abbiamo trovato altri due candidati

Calcoliamo i loro valori tramite e confrontiamoli:

ha massimo su pari a , assunto nei punti  e
e  e valore minimo , assunto in
e valore minimo , assunto in  .
.
Svolgimento 3.
. Per trovarla, indaghiamo il sistema contenente le equazioni dei vincoli:

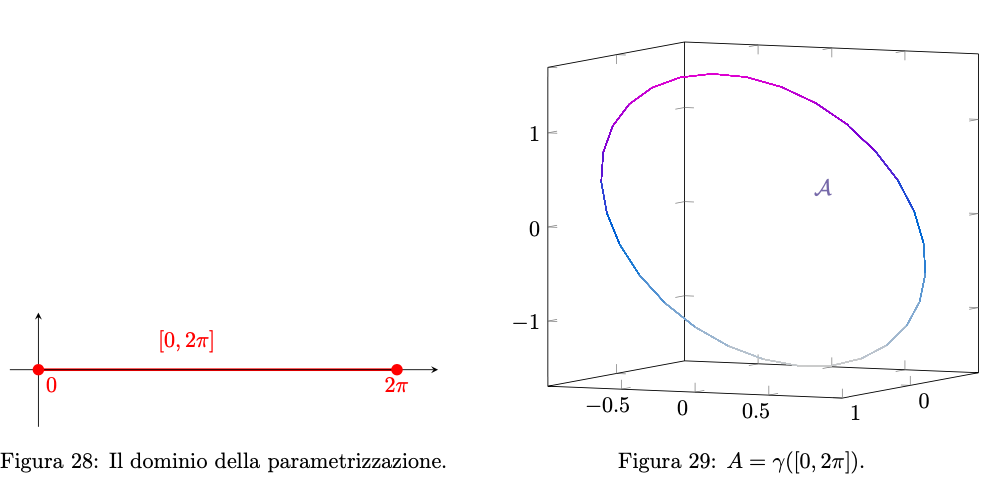
La prima equazione suggerisce di parametrizzare le prime due variabili attraverso le coordinate polari:  , con
, con ![\theta\in[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b4620004bd9a83759f01069f3d25cbbe_l3.svg "Rendered by QuickLaTeX.com") , mentre dall’ultima equazione otteniamo
, mentre dall’ultima equazione otteniamo  . Ecco dunque ottenuta la parametrizzazione di
. Ecco dunque ottenuta la parametrizzazione di ![A=\gamma([0,2\pi])](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9fc2f6d1626f7f80c9ee967e37a68e83_l3.svg "Rendered by QuickLaTeX.com") , con
, con
![\begin{equation*} \begin{array}{rcl} \gamma:[0,2\pi]&\rightarrow&\mathbb{R}^3 \\ \theta&\mapsto&(\cos\theta,\sin\theta,-\cos\theta-\sin\theta). \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4cd8eb52ddd531293e90fe9ff7e5d32b_l3.svg "Rendered by QuickLaTeX.com")
A questo punto, basterà studiare la funzione composta  sull’intervallo . Essendo e
sull’intervallo . Essendo e  continue, anche la loro composizione lo è, inoltre è un insieme compatto, quindi per il teorema di Weierstrass troveremo il massimo ed il minimo di su . Poichè la parametrizzazione è -periodica, non sarà necessario studiare gli estremi del dominio e (questo è facilmente intuibile dal fatto che la periodicità permette di traslare a piacimento il dominio della parametrizzazione, cambiando in questo modo gli estremi del dominio), ma sarà sufficiente studiare i punti critici di .
continue, anche la loro composizione lo è, inoltre è un insieme compatto, quindi per il teorema di Weierstrass troveremo il massimo ed il minimo di su . Poichè la parametrizzazione è -periodica, non sarà necessario studiare gli estremi del dominio e (questo è facilmente intuibile dal fatto che la periodicità permette di traslare a piacimento il dominio della parametrizzazione, cambiando in questo modo gli estremi del dominio), ma sarà sufficiente studiare i punti critici di .
Calcoliamo dunque la funzione composta e la sua derivata:


Dunque i punti critici di soddisfano

a cui corrispondono i valori di

Calcoliamo le corrispondenti immagini attraverso la parametrizzazione:

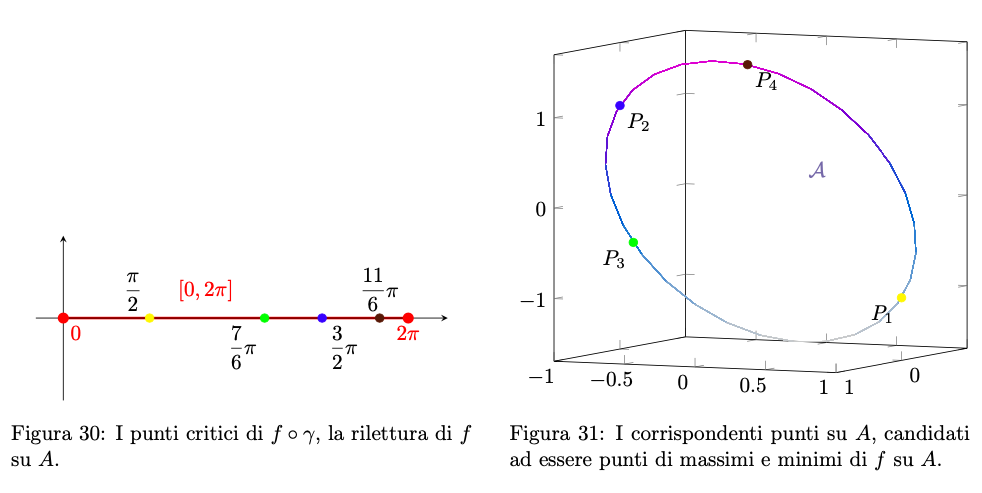
Calcoliamo i loro valori tramite e confrontiamoli:

ha massimo su pari a , assunto nei punti  e
e  e valore minimo , assunto in .
. Data la funzione definita da
e valore minimo , assunto in .
. Data la funzione definita da
![\[f(x,y,z):=2xy+xz^2,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-3a574dc8e75c5f9313b8e0698a10f37e_l3.svg "Rendered by QuickLaTeX.com")
determinare, se esistono, il massimo e il minimo di sull’insieme
![\[A:=\left\{(x,y,z)\in\mathbb{R}^3\mid x^2+y^2+z^2\leq3, \ x^2+z^2-y^2\leq 1\right\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9f3fb2cf23231bed9599ce725743d50e_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento.
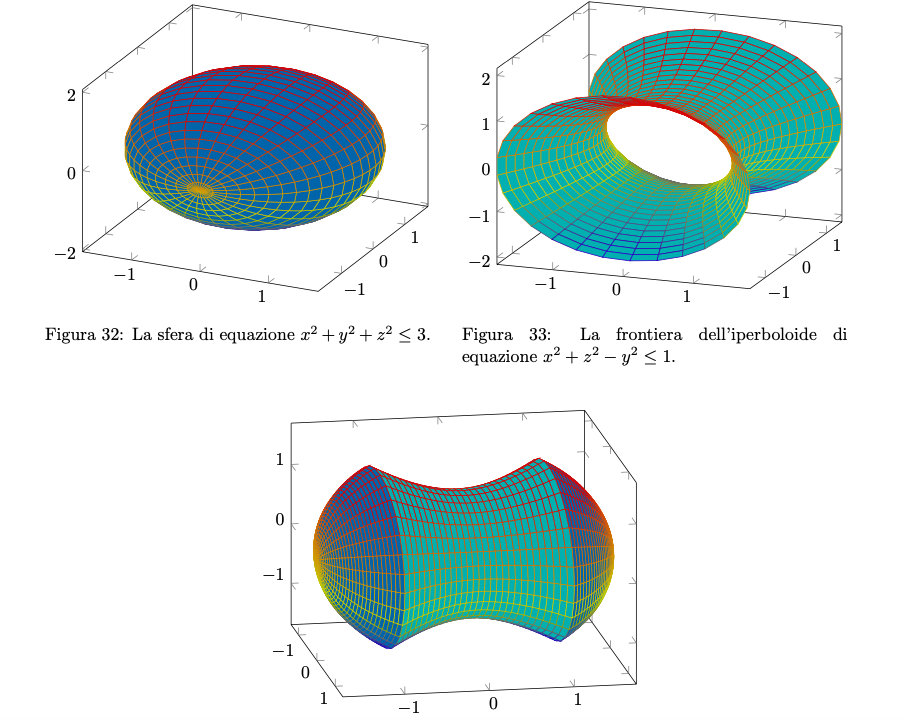
Figura 34: l’insieme .
Osserviamo che è un polinomio, pertanto è una funzione continua su , mentre l’insieme è chiuso e limitato. La chiusura segue dal fatto che è intersezione di controimmagini di insiemi chiusi di tramite funzioni continue, mentre per la limitatezza, la prima condizione assicura che è contenuto nella palla di centro l’origine e raggio  . Dunque è un chiuso e limitato di , compatto per il teorema di Heine-Borel. Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
. Dunque è un chiuso e limitato di , compatto per il teorema di Heine-Borel. Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
Distinguiamo l’insieme nella sua parte interna e la sua frontiera: , dove

e

Studiamo separatamente e in maniera differente le due componenti.
 Essendo differenziabile sull’insieme aperto , il teorema di Fermat ci assicura che gli estremi relativi di in vanno ricercati tra i suoi eventuali punti critici in , ovvero i punti tali che e scartare tutti i punti che non soddisfano tale condizione. Calcoliamo il gradiente di svolgendo le derivate parziali:
Essendo differenziabile sull’insieme aperto , il teorema di Fermat ci assicura che gli estremi relativi di in vanno ricercati tra i suoi eventuali punti critici in , ovvero i punti tali che e scartare tutti i punti che non soddisfano tale condizione. Calcoliamo il gradiente di svolgendo le derivate parziali:
![\[\begin{cases} \dfrac{\partial f}{\partial x}(x,y)=2y+z^2\\\\ \dfrac{\partial f}{\partial y}(x,y)=2x\\\\ \dfrac{\partial f}{\partial z}(x,y)=2xz, \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-196b3b6ff71b2ea4e66f678b00fd0aa1_l3.svg "Rendered by QuickLaTeX.com")
dunque
![\[\nabla f(x,y,z)=(2y+z^2,2x,2xz).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-84c519f084da62318b903c8899728958_l3.svg "Rendered by QuickLaTeX.com")
Pertanto, i punti critici di soddisfano

Possiamo allora parametrizzare i punti critici di attraverso la curva

Naturalmente, siamo interessati alla porzione di curva che giace in .
Indaghiamo la natura di questi punti critici attraverso lo studio della matrice Hessiana, valutata sui punti della curva.
Ricordiamo, prima di svolgere esplicitamente i calcoli, l’importante teorema che sta alla base di questo procedimento:
Sia di classe  , con sottoinsieme aperto e un punto critico di . Sia
, con sottoinsieme aperto e un punto critico di . Sia  la matrice Hessiana di valutata in , allora se
la matrice Hessiana di valutata in , allora se
 è definita positiva, è un punto di minimo relativo per
è definita positiva, è un punto di minimo relativo per
è definita negativa, è un punto di massimo relativo per
è indefinita, è un punto di sella per .
Ricordiamo infine cosa significa per una matrice simmetrica (come la matrice Hessiana di una funzione di classe  ) essere definita o indefinita:
) essere definita o indefinita:
una matrice simmetrica si dice definita positiva (negativa rispettivamente) se tutti i suoi autovalori sono positivi (negativi risp.)
una matrice simmetrica si dice indefinita se esistono almeno due autovalori di segno opposto.
Consci del precedente teorema, calcoliamo la matrice Hessiana di in un generico punto :

e valutiamola, dunque, nei punti appartenenti alla curva

A questo punto, per indagare la natura dei punti critici giacenti sulla curva, dovremo studiare la definitezza della matrice Hessiana su ciascuno di questi punti. Per farlo, calcoliamo il segno degli autovalori della matrice, che saranno in funzione del parametro , di evoluzione della curva. Per definizione, gli autovalori della matrice  sono i valori
sono i valori  , radici del polinomio caratteristico (possiamo affermare che gli autovalori saranno numeri reali, poiché la matrice Hessiana è una matrice simmetrica):
, radici del polinomio caratteristico (possiamo affermare che gli autovalori saranno numeri reali, poiché la matrice Hessiana è una matrice simmetrica):

dove  è la matrice identità di dimensione 3.
è la matrice identità di dimensione 3.
Calcoliamo  e cerchiamo le sue radici.
e cerchiamo le sue radici.

quindi

I valori che annullano sono


Osserviamo che, indipendentemente dal parametro , gli autovalori  e
e  hanno segno opposto, ovvero la matrice Hessiana è ovunque indefinita e per il teorema sopra citato, ne evinciamo che tutti i punti sulla curva sono punti di sella, che dunque non possono essere ne massimi ne minimi relativi.
hanno segno opposto, ovvero la matrice Hessiana è ovunque indefinita e per il teorema sopra citato, ne evinciamo che tutti i punti sulla curva sono punti di sella, che dunque non possono essere ne massimi ne minimi relativi.
Questo conclude lo studio di .
 Innanzitutto, dobbiamo capire com’è fatto . Osserviamo che
Innanzitutto, dobbiamo capire com’è fatto . Osserviamo che

Analizziamo la prima componente, mettendo a sistema l’equazione con la disequazione:

Ovviamente, affinché la prima equazione abbia soluzione nel campo dei reali, si richiede anche ![y\in\left[-\sqrt{3},\sqrt{3}\right]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-5582d890aadc52ca4ca19ccbb67c2cf7_l3.svg "Rendered by QuickLaTeX.com") . Pertanto, la prima componente rappresenta due porzioni di sfera di raggio ,
. Pertanto, la prima componente rappresenta due porzioni di sfera di raggio ,  , definite tramite
, definite tramite
![\begin{equation*} S^+:=\left\{(x,y,z)\in\mathbb{R}^3\mid x^2+y^2+z^2=3, \ y\in\left[1,\sqrt{3}\right]\right\} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-bdb6189b2c9dfc10c4015ea1faee7afa_l3.svg "Rendered by QuickLaTeX.com")
e
![\begin{equation*} S^-:=\left\{(x,y,z)\in\mathbb{R}^3\mid x^2+y^2+z^2=3, \ y\in\left[-\sqrt{3},-1\right]\right\}. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-bbef9a837f30c40eafb70f3c85fa55b6_l3.svg "Rendered by QuickLaTeX.com")

Figura 35: le due parti di sfera che compongono la frontiera di .
Ripetiamo lo stesso ragionamento anche per la seconda componente, mettendo a sistema l’equazione e la disequazione che la definiscono

Abbiamo trovato che la seconda componente è una porzione di iperboloide  , rappresentato da
, rappresentato da
![\begin{equation*} I:=\left\{(x,y,z)\in\mathbb{R}^3\mid x^2+z^2-y^2=1, \ y\in\left[-1,1\right]\right\}. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4900e388f7fd0fd96cb32ffb96d7f095_l3.svg "Rendered by QuickLaTeX.com")
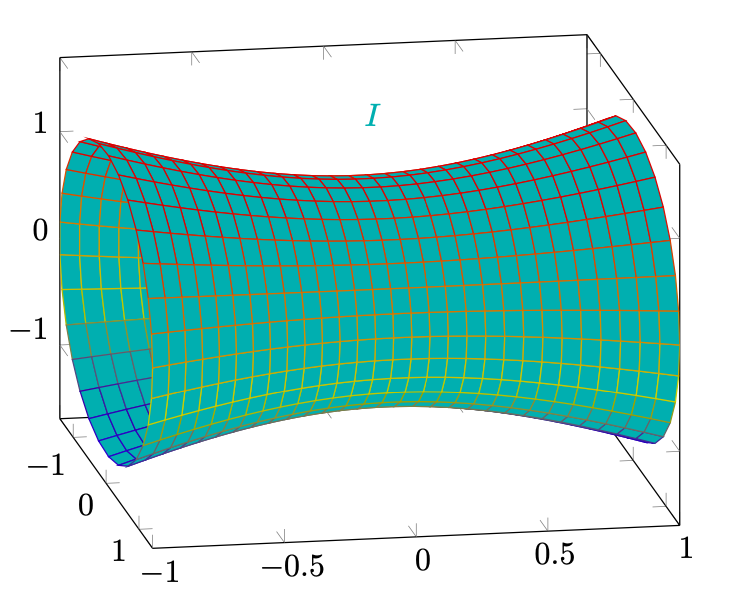
Figura 36: la parte di ipeboloide che compone il resto di .
Siamo dunque in grado di esprimere attraverso

A questo punto, studiamo separatamente il comportamento di ristretto a e , separatamente.
 Essendo
Essendo  una porzione di sfera, utilizziamo le coordinate sferiche
una porzione di sfera, utilizziamo le coordinate sferiche

prendendo inizialmente come dominio ![(\theta,\varphi)\in[0,2\pi]\times[0,\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8885ba222f3750ace8ff3a50227d83bd_l3.svg "Rendered by QuickLaTeX.com") . In questo modo, tuttavia, otteniamo una parametrizzazione dell’intera sfera di centro l’origine e raggio . Per parametrizzare , dovremo restringere il dominio della parametrizzazione . In particolare, notiamo che è definito dal vincolo
. In questo modo, tuttavia, otteniamo una parametrizzazione dell’intera sfera di centro l’origine e raggio . Per parametrizzare , dovremo restringere il dominio della parametrizzazione . In particolare, notiamo che è definito dal vincolo ![y\in\left[1,\sqrt{3}\right]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a23542c4eb70f509a9985eb12dc077fa_l3.svg "Rendered by QuickLaTeX.com") , da cui troviamo
, da cui troviamo
![\begin{equation*} \begin{cases} \sqrt{3}\cos\varphi\geq1\\\\ \sqrt{3}\cos\varphi\leq\sqrt{3} \end{cases} \Leftrightarrow \begin{cases} \cos\varphi\geq\dfrac{\sqrt{3}}{3}\\\\ \cos\varphi\leq1 \end{cases} \Leftrightarrow \varphi\in\bigcup_{k\in\mathbb{Z}}\left[-\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}+2k\pi,\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}+2k\pi\right]. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f83a077f464f34f6739a9e510439fbc5_l3.svg "Rendered by QuickLaTeX.com")
Intersecando il vincolo appena trovato con il dominio di partenza relativo a , ![\varphi\in[0,\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e912eb7c4a33d76ee0293dda71225d45_l3.svg "Rendered by QuickLaTeX.com") , otteniamo
, otteniamo
![\[\varphi\in\left[0,\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}\right].\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-77b4f870f5d69a059d4bb024cce12f64_l3.svg "Rendered by QuickLaTeX.com")
Nessun vincolo, invece, riguarda , libero di variare in . Affermiamo che una parametrizzazione regolare di sarà
![\begin{equation*} \begin{array}{ccl} \psi^+:[0,2\pi]\times\left[0,\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}\right]&\rightarrow&\mathbb{R}^3 \\\\ (\theta,\varphi)&\mapsto& \left(\sqrt{3}\cos\theta\sin\varphi,\sqrt{3}\cos\varphi,\sqrt{3}\sin\theta\sin\varphi\right), \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-10fb05b182f0671bad198892939eba22_l3.svg "Rendered by QuickLaTeX.com")
infatti, detto  , risulta che
, risulta che  è un aperto, la cui chiusura è compatta,
è un aperto, la cui chiusura è compatta,  è iniettiva e di classe su U,
è iniettiva e di classe su U,  su ed infine vale
su ed infine vale
![\[\psi^+\left([0,2\pi]\times\left[0,\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}\right]\right)=S^+.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a0821fc04d5e823f071095303cdc98f0_l3.svg "Rendered by QuickLaTeX.com")
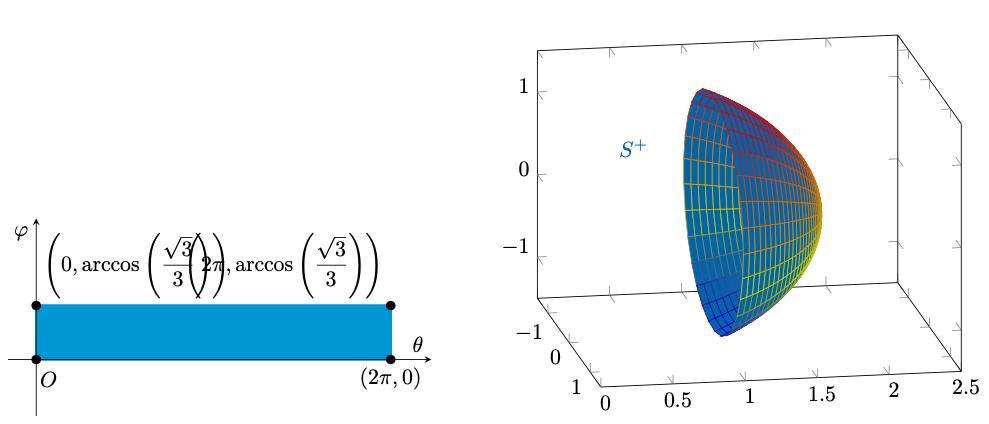
Figura 37: la parametrizzazione di .
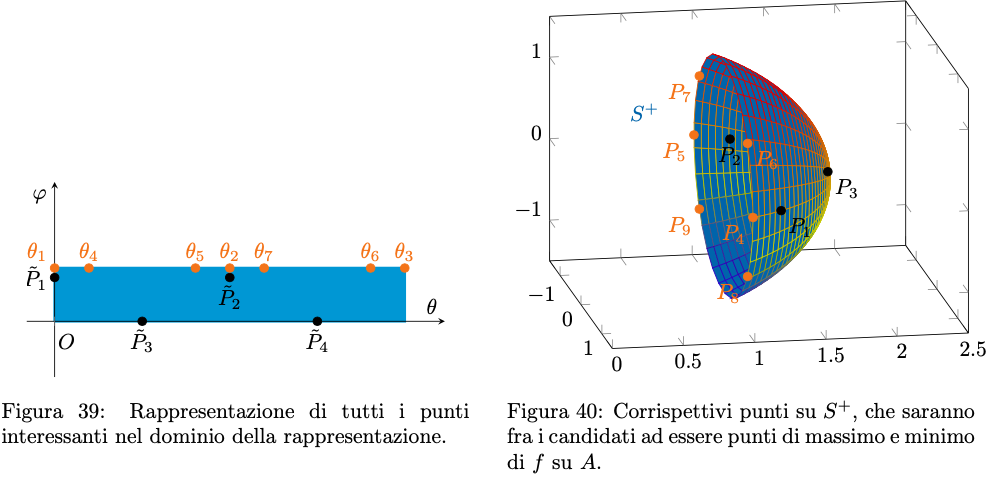
Questo ragionamento ci permette di rimpiazzare lo studio del massimo e del minimo di sulla varietà  con lo studio della funzione composta
con lo studio della funzione composta  sulla regione
sulla regione ![[0,2\pi]\times\left[0,\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}\right]\subset\mathbb{R}^2](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-60366bb9d1261606e7a9880adf63e0e4_l3.svg "Rendered by QuickLaTeX.com") , il che comporta un vantaggio notevole, vista la semplicità del dominio.
, il che comporta un vantaggio notevole, vista la semplicità del dominio.
Per prima cosa, calcoliamo esplicitamente la composizione delle due funzioni:

Cerchiamo, dunque, il massimo ed il minimo della funzione su ![[0,2\pi]\times\left[0,\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}\right]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7896a7374e68283e7a81938fe54bd9af_l3.svg "Rendered by QuickLaTeX.com") . Essendo e
. Essendo e  di classe , sono a fortiori continue, cosi come lo è la loro composizione, inoltre è un compatto di , dunque per il Teorema di Weierstrass, esisterà il massimo ed il minimo di su .
di classe , sono a fortiori continue, cosi come lo è la loro composizione, inoltre è un compatto di , dunque per il Teorema di Weierstrass, esisterà il massimo ed il minimo di su .
Vorremmo distinguere la parte interna di , che abbiamo denotato con e la sua frontiera, che andranno studiate in maniera diversa. Osserviamo tuttavia che la frontiera della varietà è parametrizzata da
![\[\partial S^+=\psi^+\left([0,2\pi]\times\left\{\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}\right\}\right).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a3cff79db32dc240ac9fb2c362dd9f0c_l3.svg "Rendered by QuickLaTeX.com")
Ciò significa che è possibile riparametrizzare in maniera tale che i valori di  e
e  non siano più estremi del dominio, ma stiano nella sua parte interna. Dunque, detti
non siano più estremi del dominio, ma stiano nella sua parte interna. Dunque, detti ![R:=[0,2\pi]\times\left[0,\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}\right]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-03e4f99feb3b9aa0ce9c12bf20a8a68d_l3.svg "Rendered by QuickLaTeX.com") ed
ed ![L:=[0,2\pi]\times\left\{\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}\right\}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-393a7f35996ba46781fe51314f9b54e8_l3.svg "Rendered by QuickLaTeX.com") , per lo studio dei punti di massimo e minimo è conveniente distinguere
, per lo studio dei punti di massimo e minimo è conveniente distinguere  , da affrontare mediante il teorema di Fermat ed
, da affrontare mediante il teorema di Fermat ed  , attraverso una sua esplicita parametrizzazione.
, attraverso una sua esplicita parametrizzazione.
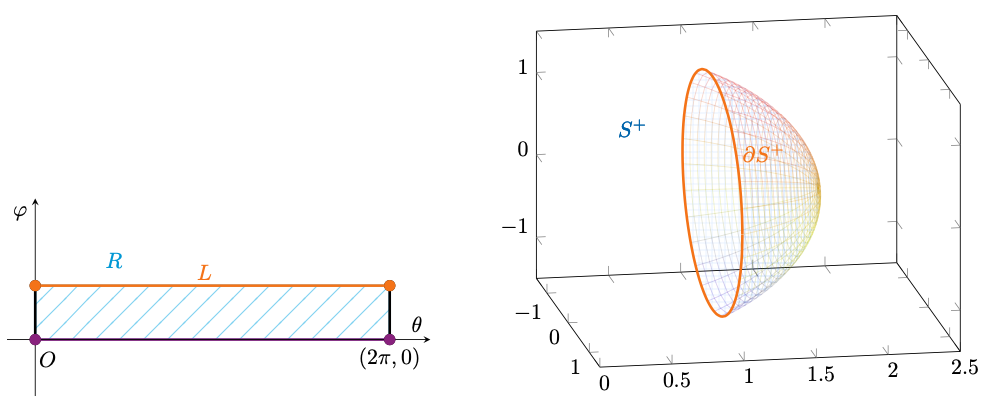
Figura 38: studio della frontiera di .
 Utilizziamo il teorema di Fermat per trovare gli eventuali punti di massimo e minimo relativo di su , nonostante esso non sia un insieme aperto, per le considerazioni fatte in precedenza. Su , condizione necessaria affinché un punto
Utilizziamo il teorema di Fermat per trovare gli eventuali punti di massimo e minimo relativo di su , nonostante esso non sia un insieme aperto, per le considerazioni fatte in precedenza. Su , condizione necessaria affinché un punto  sia punto di massimo o minimo relativo della funzione differenziabile su è che esso sia un suo punto critico, ovvero che si verifichi
sia punto di massimo o minimo relativo della funzione differenziabile su è che esso sia un suo punto critico, ovvero che si verifichi  . Calcoliamo allora il gradiente di attraverso il calcolo delle derivate parziali:
. Calcoliamo allora il gradiente di attraverso il calcolo delle derivate parziali:


dunque

Calcoliamo allora i punti critici, ovvero i punti che annullano il gradiente:
(3) 
Osserviamo immediatamente che la prima equazione si annulla se  o
o  . Supponiamo inizialmente , che si verifica per
. Supponiamo inizialmente , che si verifica per  , nei quali casi
, nei quali casi  e inserendo quest’informazione nella seconda equazione troviamo
e inserendo quest’informazione nella seconda equazione troviamo

che si annulla se e solo se

Notiamo che per  ,
,
![\[\varphi=\dfrac{\pi}{4}\in\left[0,\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}\right],\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-0ed43c6f03dd300ff62469e72e4acc30_l3.svg "Rendered by QuickLaTeX.com")
dunque abbiamo trovato i primi punti da considerare:

a cui corrispondono i punti

su .
Se invece , che per l’intervallo interessato da si verifica solamente per , la seconda equazione si riduce a

Abbiamo trovato in questo modo altri due punti da considerare:

Essi hanno la stessa immagine rispetto a e indivuano il punto

La seconda equazione si annulla se  , ovvero per
, ovvero per  , che inserito nella prima equazione implica
, che inserito nella prima equazione implica

Questa equazione si annulla se , che ci porta a ritrovare i punti  e
e  , oppure se
, oppure se

Risoviamo l’equazione:

Definiamo  , dunque l’equazione precedente risulta essere
, dunque l’equazione precedente risulta essere

che si annulla per

Poiché ![t=\cos\varphi\in[-1,1]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2aba2dcd41a75a482f37e3ee08cd610e_l3.svg "Rendered by QuickLaTeX.com") , la prima soluzione non è accettabile, mentre la seconda implica
, la prima soluzione non è accettabile, mentre la seconda implica
![\begin{equation*} \varphi=\arccos{\left(-\dfrac{\sqrt{3}}{3}\right)}\notin\left[0,\arccos{\left(\dfrac{\sqrt{3}}{3}\right)}\right]. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4fdfd23710332070949be40549f50896_l3.svg "Rendered by QuickLaTeX.com")
Ciò detto, possiamo supporre  , dunque il sistema (3) si riduce a
, dunque il sistema (3) si riduce a

A questo punto, è conveniente moltiplicare entrambi i membri della prima equazione per  e per farlo, dobbiamo supporre
e per farlo, dobbiamo supporre  , secondo i principi delle equazioni. Tuttavia, prima dobbiamo controllare che non perdiamo soluzioni: se fosse
, secondo i principi delle equazioni. Tuttavia, prima dobbiamo controllare che non perdiamo soluzioni: se fosse  , la seconda equazione implicherebbe , ma nelle nostre ipotesi,
, la seconda equazione implicherebbe , ma nelle nostre ipotesi,  . Siamo quindi liberi per moltiplicare la prima equazione per :
. Siamo quindi liberi per moltiplicare la prima equazione per :

e sommiamo nella prima riga le due equazioni del sistema:


Poiché , la prima equazione comporta

che, inserito nella seconda equazione, ci porta all’equazione nella sola variabile

Utilizzando ancora l’identità fondamentale goniometrica, troviamo


Ricordando che , la precedente equazione si annulla se

che si verifica per
![\begin{equation*} \cos\theta_{1,2}=\dfrac{7\sqrt{3}\pm\sqrt{147+324}}{18}\notin\left[\dfrac{\sqrt{3}}{3},1\right]. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-779ce57d4dd62ec6b70ff47d0d34dad7_l3.svg "Rendered by QuickLaTeX.com")
Questo conclude lo studio di .
 Osserviamo che su , si riduce a
Osserviamo che su , si riduce a

Essendo una funzione derivabile di una variabile, periodica sul suo dominio, basterà studiare i punti che annullano la sua derivata prima:
![\begin{equation*} \begin{split} (f\circ\psi^+)'|_L(\theta)&=2\sqrt{2}\left[-\sin\theta\left(1+\sin^2\theta\right)+2\sin\theta\cos\theta\right]\\ &=2\sqrt{2}\sin\theta\left(3\cos^2\theta-2\right), \end{split} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-80fbf60354d4343b755d8cdb43c25bdf_l3.svg "Rendered by QuickLaTeX.com")
che si annulla solamente se

ovvero per

Troviamo i corrispondenti punti su  :
:

Questo conclude lo studio di .
 La situazione è inizialmente molto simile rispetto allo studio di , infatti anche
La situazione è inizialmente molto simile rispetto allo studio di , infatti anche  è una porzione di sfera di raggio . Utilizziamo nuovamente le coordinate sferiche
è una porzione di sfera di raggio . Utilizziamo nuovamente le coordinate sferiche
e selezioniamo accuratamente il dominio di queste coordinate per ottenere una parametrizzazione regolare di . Poiché è definito dal vincolo ![y\in\left[-\sqrt{3},-1\right]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-fe4f0c54d917ada8ab0e66af4b1fea93_l3.svg "Rendered by QuickLaTeX.com") , avremo
, avremo
![\begin{equation*} \begin{split} \begin{cases} \sqrt{3}\cos\varphi\leq-1\\\\ \sqrt{3}\cos\varphi\geq-\sqrt{3} \end{cases} & \iff \begin{cases} \cos\varphi\leq-\dfrac{\sqrt{3}}{3}\\\\ \cos\varphi\geq-1 \end{cases} \\ & \iff \varphi\in\bigcup_{k\in\mathbb{Z}}\left[\arccos{\left(-\dfrac{\sqrt{3}}{3}\right)}+2k\pi,-\arccos{\left(-\dfrac{\sqrt{3}}{3}\right)}+2(k+1)\pi\right]. \end{split} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-08aa41498ea4cc8cc860a9948e20231f_l3.svg "Rendered by QuickLaTeX.com")
Intersecando con il naturale dominio della parametrizzazione della sfera completa, per cui solitamente vale , si ha
![\begin{equation*} \varphi\in\left[\arccos{\left(-\dfrac{\sqrt{3}}{3}\right)},\pi\right]. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-c2deaf190126eaa47cb7cb3f23baf5f6_l3.svg "Rendered by QuickLaTeX.com")
Di nuovo, la variabile non ha vincoli. Possiamo allora affermare, riprendendo le giustificazioni fornite al passaggio precedente, che una parametrizzazione regolare di è la seguente
![\begin{equation*} \begin{array}{ccl} \psi^-:[0,2\pi]\times\left[\arccos{\left(-\dfrac{\sqrt{3}}{3}\right)},\pi\right]&\rightarrow&\mathbb{R}^3 \\\\ (\theta,\varphi)&\mapsto& \left(\sqrt{3}\cos\theta\sin\varphi,\sqrt{3}\cos\varphi,\sqrt{3}\sin\theta\sin\varphi\right). \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-c117297f1f69622aa49149d791ee541b_l3.svg "Rendered by QuickLaTeX.com")
Questo ragionamento ci permette nuovamente di semplificare lo studio del massimo e minimo di sulla varietà attraverso il più comodo problema di determinare massimo e minimo della funzione composta  sulla regione
sulla regione ![[0,2\pi]\times\left[\arccos{\left(-\dfrac{\sqrt{3}}{3}\right)},\pi\right]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-bdab84f068b80c50d680d30664d59b81_l3.svg "Rendered by QuickLaTeX.com") .
.
Osserviamo che, essendo l’espressione funzionale di  uguale a quella di , si trova come prima
uguale a quella di , si trova come prima

Ciò che cambia rispetto a prima è ovviamente il dominio.
Essendo il dominio compatto e la funzione continua, il Teorema di Weierstrass garantisce l’esistenza dei punti di massimo e minimo. Come prima, definiamo ![R':=[0,2\pi]\times\left[\arccos{\left(-\dfrac{\sqrt{3}}{3}\right)},\pi\right]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-636f582d411d16e8331c7164c24303b4_l3.svg "Rendered by QuickLaTeX.com") e
e ![L':=[0,2\pi]\times\left\{\arccos{\left(-\dfrac{\sqrt{3}}{3}\right)}\right\}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-923c269e0e527b8bc6e99770c107ebb7_l3.svg "Rendered by QuickLaTeX.com") e
distinguiamo
e
distinguiamo  da
da  che andranno studiati in maniera diversa.
che andranno studiati in maniera diversa.
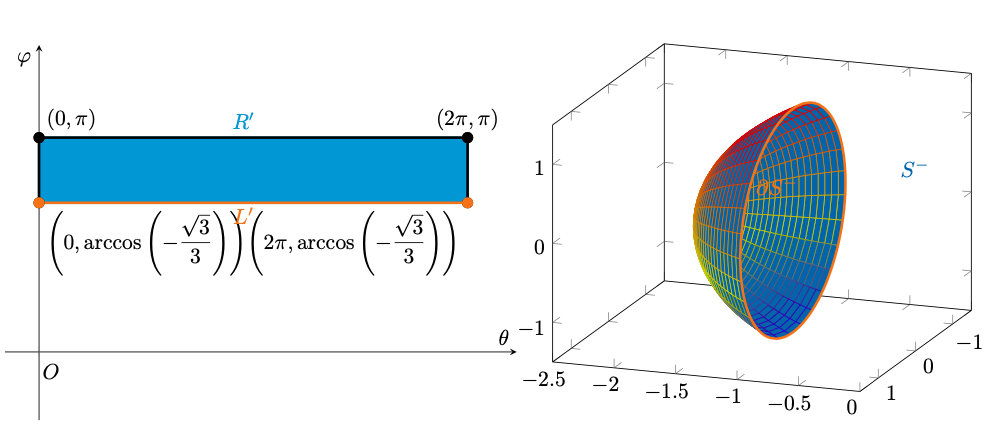
Figura 41: parametrizzazione di .
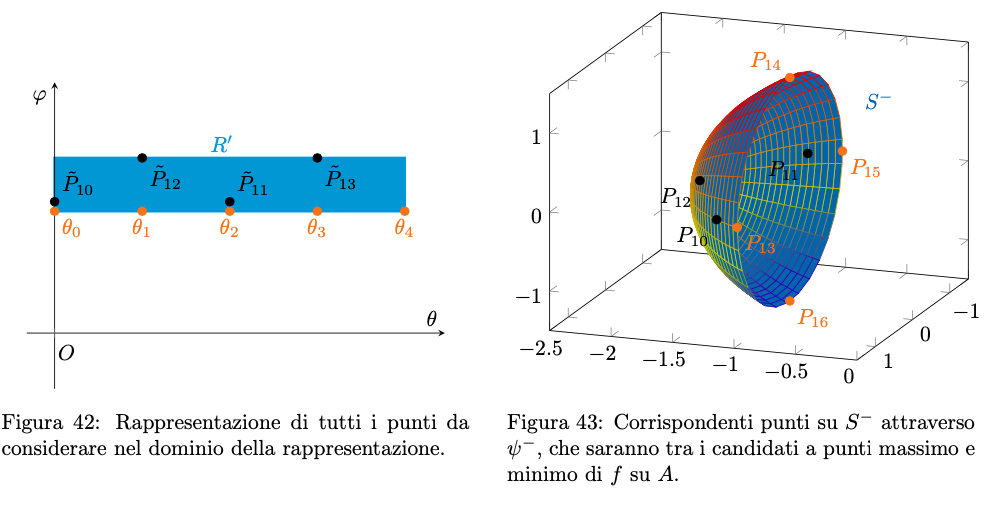
 Lo strumento che ci è d’aiuto in queste situazioni è sempre il Teorema di Fermat: poiché è differenziabile su , per trovare i suoi punti di massimo e minimo, dovremo andare alla ricerca dei punti critici di su . Calcoliamo dunque il gradiente di e i punti che lo annullano.
Lo strumento che ci è d’aiuto in queste situazioni è sempre il Teorema di Fermat: poiché è differenziabile su , per trovare i suoi punti di massimo e minimo, dovremo andare alla ricerca dei punti critici di su . Calcoliamo dunque il gradiente di e i punti che lo annullano.
Possiamo avvalerci di tutti i calcoli svolti in precedenza, dal momento che la funzione da studiare è esattamente la stessa:
Affrontiamo lo studio dei punti critici come abbiamo fatto in precedenza, con l’unica differenza che ora ![\varphi\in\left[\arccos{\left(-\dfrac{\sqrt{3}}{3}\right)},\pi\right]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-dc92214d95d669514ef9b999b693b0b0_l3.svg "Rendered by QuickLaTeX.com") : supponendo , abbiamo trovato
: supponendo , abbiamo trovato  , che solo per
, che solo per  può appartenere a
può appartenere a  . Abbiamo dunque trovato due punti da considerare:
. Abbiamo dunque trovato due punti da considerare:

a cui corrispondono i punti su

Supponiamo poi , che può verificarsi solo per  , che porta a e dunque ai punti
, che porta a e dunque ai punti

i quali ambedue individuano il punto su

Supponendo invece , cioè troviamo

in cui solo l’ultima soluzione è accettabile e comporta  , a cui corrispondono i punti
, a cui corrispondono i punti

che tuttavia appartengono ad , sui cui il Teorema di Fermat non ha valenza.
Procedendo come prima, troviamo che l’ultima possibile soluzione al sistema si verifica per
![\begin{equation*} \cos\theta_{1,2}=\dfrac{7\sqrt{3}\pm\sqrt{147+324}}{18}\notin\left[-1,-\dfrac{\sqrt{3}}{3}\right] \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d5acaa9728c41399105119d5d2c4df6f_l3.svg "Rendered by QuickLaTeX.com")
quindi non si hanno altre soluzioni.
 Poiché su vale
Poiché su vale  e
e  , la restrizione di su vale
, la restrizione di su vale

che assume punti critici per  , con
, con  . Ad essi, corrispondono i punti su
. Ad essi, corrispondono i punti su 

Questo conclude lo studio della seconda varietà, .
 Notiamo che è un iperboloide, ottenibile come superficie di rivoluzione della curva
Notiamo che è un iperboloide, ottenibile come superficie di rivoluzione della curva
![\begin{equation*} \gamma(t):=\left(\sqrt{1+t^2},t\right),\qquad t\in[-1,1]. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-bf53dd82e575680382685f48e0e32960_l3.svg "Rendered by QuickLaTeX.com")
Pertanto, una parametrizzazione regolare di è la seguente:
![\begin{equation*} \begin{array}{rcl} \Phi:[0,2\pi]\times[-1,1]&\rightarrow&\mathbb{R}^3 \\ (\theta,t)&\mapsto&\left(\sqrt{1+t^2}\cos\theta,t,\sqrt{1+t^2}\sin\theta\right). \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1b942b812f097338d03415727633487e_l3.svg "Rendered by QuickLaTeX.com")
Osserviamo anche che  , che sono già state precedentemente studiate. Dunque sarà necessario occuparsi esclusivamente di
, che sono già state precedentemente studiate. Dunque sarà necessario occuparsi esclusivamente di ![I^\circ=\Phi\left([0,2\pi]\times(-1,1)\right)](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-cae54ab1dbff70d330b0691382e64612_l3.svg "Rendered by QuickLaTeX.com") .
.
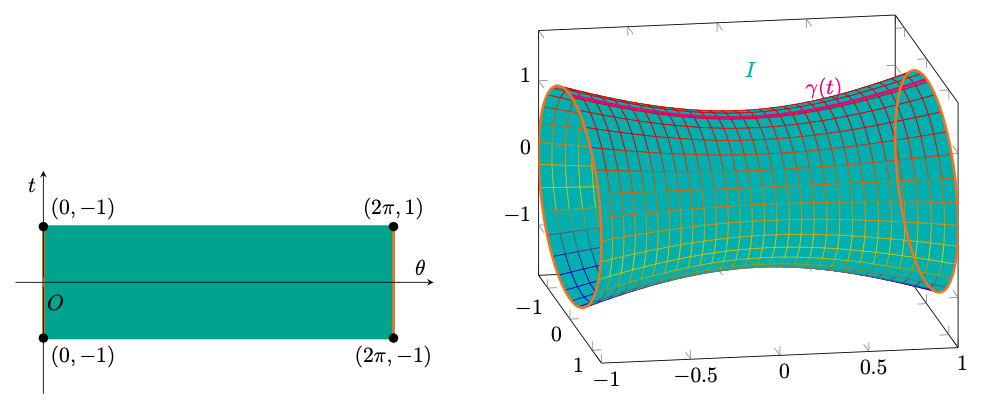
Figura 44: parametrizzazione di .
Servendoci del teorema di Fermat, andiamo ad indagare l’insieme dei punti critici della funzione composta  per trovare i punti di massimo o minimo relativi di su . Per prima cosa calcoliamo :
per trovare i punti di massimo o minimo relativi di su . Per prima cosa calcoliamo :

Ora, calcoliamo il suo gradiente, per trovare i punti su ![[0,2\pi]\times(-1,1)](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e5f459e8fae3caf7be9a4f8e801b82a0_l3.svg "Rendered by QuickLaTeX.com") che lo annullano:
che lo annullano:
![\begin{equation*} \begin{split} \dfrac{\partial}{\partial\theta}\left(f\circ\Phi\right)(\theta,t)&=-\sqrt{1+t^2}\sin\theta\left(2t+(1+t^2)\sin^2\theta\right)+2\sin\theta\cos^2\theta(1+t^2)^{\frac{3}{2}}\\ &=\sqrt{1+t^2}\sin\theta\left[-2t-(1+t^2)\sin^2\theta+2(1+t^2)\cos^2\theta\right]\\ &=\sqrt{1+t^2}\sin\theta\left[-2t-3(1+t^2)\sin^2\theta+2(1+t^2)\right]\\ &=\sqrt{1+t^2}\sin\theta\left[(1+t^2)(2-3\sin^2\theta)-2t\right], \end{split} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-44a3c06817c31d6d4f205b001e1193d1_l3.svg "Rendered by QuickLaTeX.com")
![\begin{equation*} \begin{split} \dfrac{\partial}{\partial t}\left(f\circ\Phi\right)(\theta,t)&=\dfrac{t}{\sqrt{1+t^2}}\cos\theta\left(2t+(1+t^2)\sin^2\theta\right)+\left(2+2t\sin^2\theta\right)\sqrt{1+t^2}\cos\theta\\ &=\sqrt{1+t^2}\cos\theta\left[\dfrac{2t^2+(1+t^2)t\sin^2\theta}{1+t^2}+2+2t\sin^2\theta\right]\\ &=\dfrac{\sqrt{1+t^2}\cos\theta}{1+t^2}\left[2t^2+(1+t^2)t\sin^2\theta+2(1+t^2)+2t(1+t^2)\sin^2\theta\right]\\ &=\dfrac{\cos\theta}{\sqrt{1+t^2}}\left[3t(1+t^2)\sin^2\theta+4t^2+2\right], \end{split} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-851725c97510ec27143e937036ca40f7_l3.svg "Rendered by QuickLaTeX.com")
da cui
![\begin{equation*} \nabla (f\circ\Phi)(\theta,t)=\left(\sqrt{1+t^2}\sin\theta\left[(1+t^2)(2-3\sin^2\theta)-2t\right],\dfrac{\cos\theta}{\sqrt{1+t^2}}\left[3t(1+t^2)\sin^2\theta+4t^2+2\right]\right). \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a3312abbe8219c6c8cec2ef6f6e77160_l3.svg "Rendered by QuickLaTeX.com")
I punti critici di sono le coppie  che soddisfano
che soddisfano
![\begin{equation*} \left\{\begin{array}{l} \sqrt{1+t^2}\sin\theta\left[(1+t^2)(2-3\sin^2\theta)-2t\right]=0\\\\ \dfrac{\cos\theta}{\sqrt{1+t^2}}\left[3t(1+t^2)\sin^2\theta+4t^2+2\right]=0. \end{array}\right. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-158cad628171675091a881e726057656_l3.svg "Rendered by QuickLaTeX.com")
Consideriamo prima le possibili soluzioni banali: la prima equazione si annulla se , che inserito nella seconda fornisce
![\begin{equation*} \dfrac{\cos\theta}{\sqrt{1+t^2}}\left[4t^2+2\right]=0\Leftrightarrow\cos\theta=0, \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7fe84dd770889374d0ada7e9276e6354_l3.svg "Rendered by QuickLaTeX.com")
che è chiaramente incompatibile con l’ipotesi . Allo stesso modo, la seconda equazione si annulla per , da cui  , dunque la prima equazione diventerebbe
, dunque la prima equazione diventerebbe

valore che non possiamo accettare poiché si trova sulla frontiera del dominio considerato e non nella sua parte interna.
A questo punto, è lecito supporre  , dunque, osservando che
, dunque, osservando che  il sistema precedente si riduce a
il sistema precedente si riduce a

Converrebbe moltiplicare la prima equazione per , tuttavia è necessario supporre  , per il secondo principio delle equazioni. Prima, però, dobbiamo controllare se il caso
, per il secondo principio delle equazioni. Prima, però, dobbiamo controllare se il caso  comporta delle soluzioni: la seconda equazione diventerebbe impossibile per , dunque possiamo supporre e moltiplicare la prima equazione del sistema per :
comporta delle soluzioni: la seconda equazione diventerebbe impossibile per , dunque possiamo supporre e moltiplicare la prima equazione del sistema per :

Sommando nella prima riga le equazioni tra loro risulta

La prima equazione è nella sola variabile e può essere risolta esplicitamente, infatti

che di nuovo non accettiamo. Questo significa che su non vi sono punti interessanti.
Abbiamo trovato in tutto  candidati ad essere punti di massimo o minimo di su .
candidati ad essere punti di massimo o minimo di su .
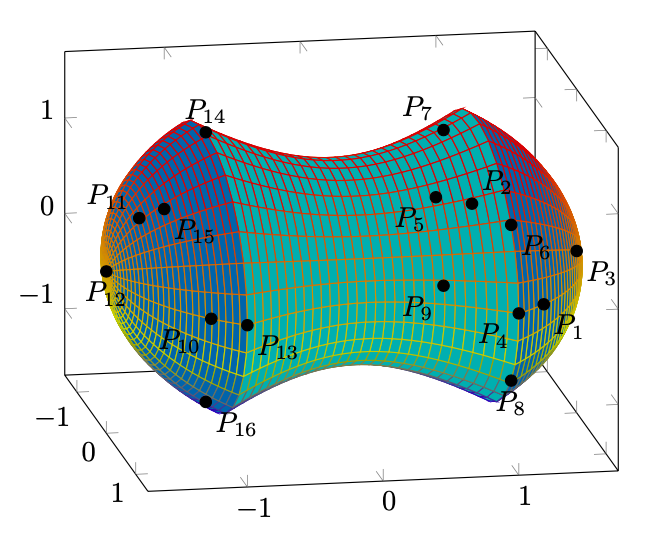
Figura 45: illustrazione di tutti i 16 punti, candidati ad essere punti di massimo o minimo di su .
Calcoliamo i loro valori secondo e confrontiamoli.

ha massimo su pari a  , assunto nei punti
, assunto nei punti  e
e  , mentre il minimo vale
, mentre il minimo vale  assunto in
assunto in  e in
e in  .
. Data la funzione definita da
.
. Data la funzione definita da
![\[f(x,y,z):=\dfrac{x^2+y^2+z^2}{2},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ca696a32e4f95695e94c38ecea63c7f2_l3.svg "Rendered by QuickLaTeX.com")
determinare, se esistono, il massimo e il minimo di sull’insieme
![\[A:=\{(x,y,z)\in\mathbb{R}^3\mid x+y+1=0, \ y+z+1=0\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2584d75fc3ec7c3d190dd9689e878013_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento.
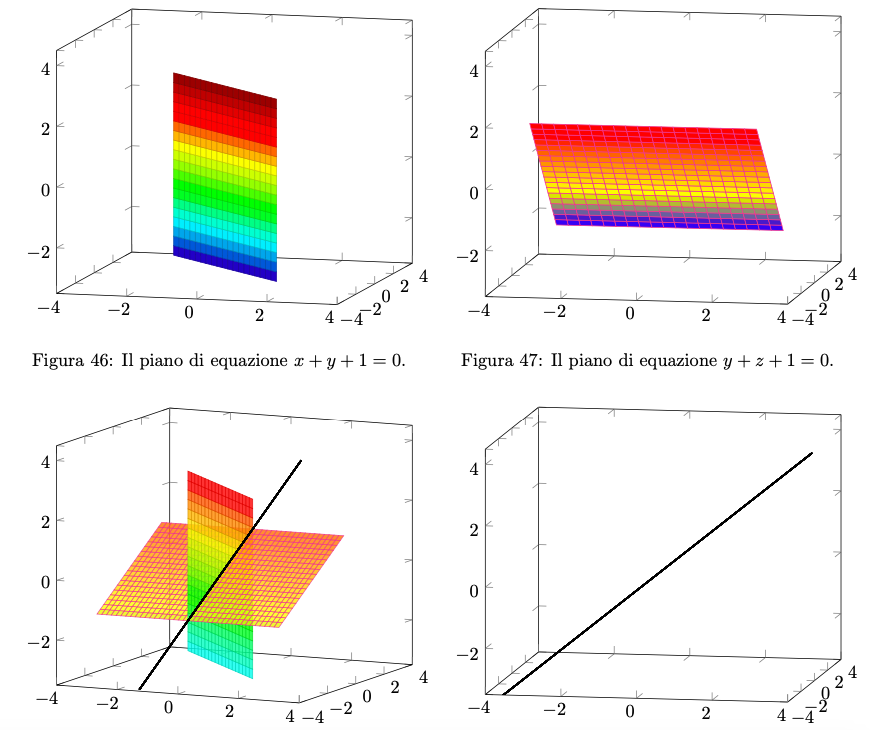
Figura 48: la loro intersezione è l’insieme , raffigurato in nero.
Osserviamo che l’insieme è intersezione di piani non paralleli, pertanto forma una retta in . Ciò significa che non è un sottoinsieme limitato di e quindi non possiamo applicare il teorema di Weierstrass. Tuttavia, osserviamo che è strettamente convessa e è un insieme chiuso e convesso di , quindi possiamo quantomeno affermare che assume il minimo su .
Osserviamo che , dunque .
Cerchiamo una parametrizzazione di e studiamo la funzione composta . Per trovare la parametrizzazione, risolviamo il sistema formato dalle equazioni definenti :

Confrontando le equazioni tra loro, troviamo  e
e  . Allora, una possibile parametrizzazione di è la seguente:
. Allora, una possibile parametrizzazione di è la seguente:


Calcoliamo  e il suo punto critico (l’unicità segue dalla convessità di e l’iniettività di ).
e il suo punto critico (l’unicità segue dalla convessità di e l’iniettività di ).

Dunque

da cui

Abbiamo dunque trovato un solo punto critico, come annunciato, il quale non può che essere il punto minimizzante la funzione su . Esso corrisponde al punto

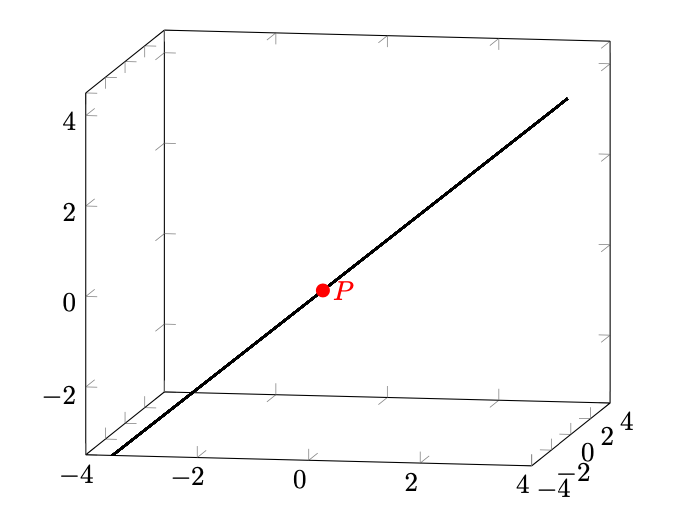
Figura 49:  è l’unico punto critico di .
è l’unico punto critico di .
Il valore di in quel punto è

Osserviamo, invece, che non esiste il massimo di su . In particolare, proveremo che  e ciò è sufficiente a garantire che non assuma su il suo estremo superiore, ovvero che il massimo non esista.
e ciò è sufficiente a garantire che non assuma su il suo estremo superiore, ovvero che il massimo non esista.
Abbiamo già parametrizzato tramite e calcolato  . Calcoliamo allora
. Calcoliamo allora

Ciò dimostra effettivamente che e che dunque non ammette massimo su .
ha minimo su pari a  , assunto nel punto
, assunto nel punto  , mentre non ha massimo su .
, mentre non ha massimo su .
 . Tra tutti i triangoli di fissato perimetro
. Tra tutti i triangoli di fissato perimetro  , trovare quello di area massima.
, trovare quello di area massima.
Svolgimento 1.
 un triangolo generico di vertici
un triangolo generico di vertici  ,
,  e
e  . Osserviamo che con una rototraslazione possiamo sempre supporre
. Osserviamo che con una rototraslazione possiamo sempre supporre  e
e  . Infatti, consideriamo l’isometria di
. Infatti, consideriamo l’isometria di


dove  è la traslazione
è la traslazione

che trasla il piano in modo tale che il punto nell’origine e la rotazione  è della forma
è della forma

dove  è la matrice
è la matrice

con  un opportuno angolo definito dalla relazione
un opportuno angolo definito dalla relazione

Si dimostra immediatamente che  , mentre
, mentre

in particolare,  .
.
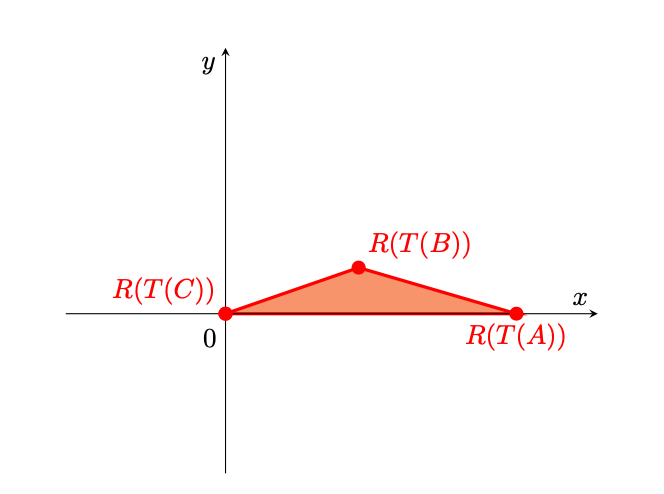
Figura 52: rotazione che sposta la traslazione di sull’asse , ottenendo la configurazione descritta.
Poiché è un’isometria, essa lascia inalterate aree e lunghezze. Per questo motivo possiamo dunque supporre, senza perdita di generalità, che il triangolo sia della forma  , con
, con  ,
,  e .
e .
Introduciamo le variabili  per esprimere le coordinate dei punti:
per esprimere le coordinate dei punti:

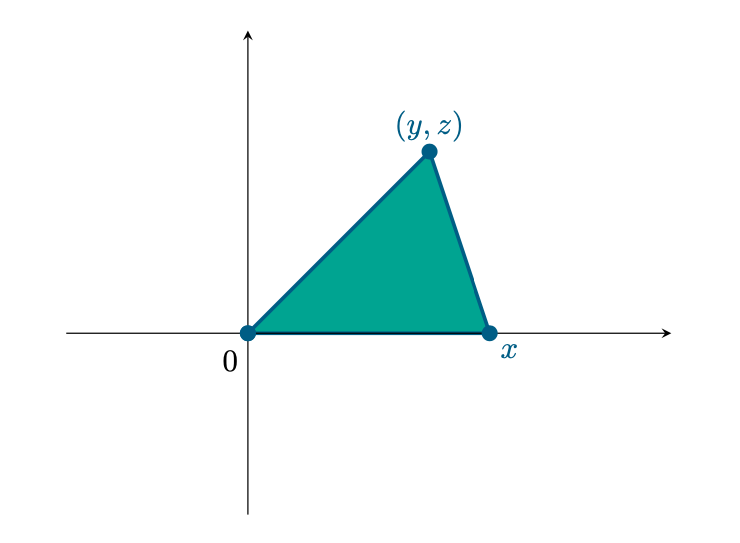
Figura 53: le coordinate , e corrispondono rispettivamente alla prima coordinata di e alle coordinate di .
A questo punto, è facile esprimere il perimetro e l’area del triangolo in queste coordinate:

e l’area, indicata con 

Supponiamo per semplicità  . Ciò è sempre possibile, utilizzando, se necessario, le riflessioni
. Ciò è sempre possibile, utilizzando, se necessario, le riflessioni

essendo perimetro e area invarianti per riflessioni. Possiamo cosi esprimere il problema, inizialmente geometrico, in un problema di ottimizzazione vincolata, ovvero trovare il massimo della funzione
![\[\mathcal{A}=\dfrac{1}{2}xz\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f43c2608ae9a0610df391b0374d19908_l3.svg "Rendered by QuickLaTeX.com")
soggetta al vincolo

dove

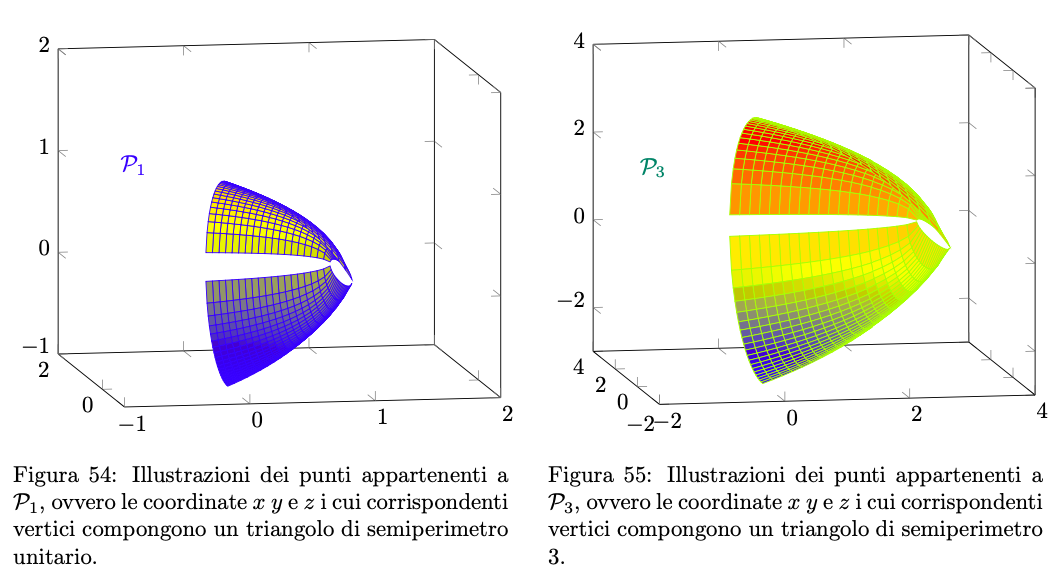
Utilizziamo a tal fine il metodo dei moltiplicatori di Lagrange, costruendo la funzione Lagrangiana  ,
,

Dal teorema dei moltiplicatori di Lagrange sappiamo che ai punti critici della funzione vincolata all’insieme  corrispondono i punti critici non vincolati della funzione . Ricerchiamo allora questi ultimi, cioè i punti
corrispondono i punti critici non vincolati della funzione . Ricerchiamo allora questi ultimi, cioè i punti  tali che
tali che

Applicato alla nostra Lagrangiana, il sistema diventa
![\begin{equation*} \left\{\begin{array}{l} \dfrac{z}{2}+\lambda+\dfrac{\lambda(x-y)}{\sqrt{(x-y)^2+z^2}}=0 \\\\ \dfrac{\lambda y}{\sqrt{y^2+z^2}}+\dfrac{\lambda(y-x)}{\sqrt{(x-y)^2+z^2}}=0\\\\ \dfrac{x}{2}+\dfrac{\lambda z}{\sqrt{y^2+z^2}}+\dfrac{\lambda z}{\sqrt{(x-y)^2+z^2}}=0\\\\ x+\sqrt{y^2+z^2}+\sqrt{(x-y)^2+z^2}=2p\\\\ \end{array}\right.\Leftrightarrow\left\{\begin{array}{l} \dfrac{z}{2}+\lambda+\dfrac{\lambda(x-y)}{\sqrt{(x-y)^2+z^2}}=0 \\\\ \lambda\left[\dfrac{y}{\sqrt{y^2+z^2}}+\dfrac{y-x}{\sqrt{(x-y)^2+z^2}}\right]=0\\\\ \dfrac{x}{2}+\dfrac{\lambda z}{\sqrt{y^2+z^2}}+\dfrac{\lambda z}{\sqrt{(x-y)^2+z^2}}=0\\\\ x+\sqrt{y^2+z^2}+\sqrt{(x-y)^2+z^2}=2p.\\\\ \end{array}\right. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b3a46316342ab233f21d2f793faab1a3_l3.svg "Rendered by QuickLaTeX.com")
Osserviamo che la prima equazione si annulla se  , tuttavia di conseguenza tutte le altre variabili si annullerebbero producendo un triangolo di area nulla, che non può chiaramente rappresentare il massimo dell’area possibile.
, tuttavia di conseguenza tutte le altre variabili si annullerebbero producendo un triangolo di area nulla, che non può chiaramente rappresentare il massimo dell’area possibile.
Possiamo allora supporre  e ridurre il precedente sistema a
e ridurre il precedente sistema a

Manipoliamo algebricamente la seconda equazione per ottenere la prima informazione preziosa:

Ma questo implica che i denominatori della seconda equazione coincidono, pertanto coincideranno anche i numeratori:

Quest’informazione esprime geometricamente che il triangolo è isoscele. Dobbiamo mostrare che si tratta di un triangolo equilatero, caso più particolare di un triangolo isoscele.
Risolviamo il sistema, con le relazioni  ,
,  :
:

Dall’ultima equazione risulta

che inserita nelle altre equazioni comporta

Esplicitiamo nella prima equazione:

(4) 
Sostituiamo questa espressione nella terza equazione per ottenere :

Sostituiamo questa espressione in (4) per trovare

da cui

Sostituendo quest’espressione nell’ultima equazione, finalmente ricaviamo :

Possiamo immediatamente trovare le altre variabili:

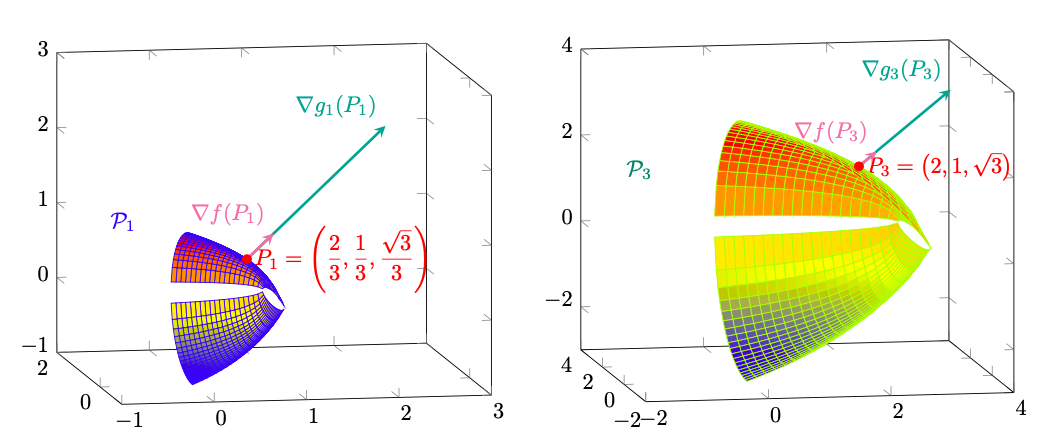
Figura 56: in entrambe le situazioni i gradienti di e  nei punti prestabiliti sono linearmente dipendenti, essendo paralleli.
nei punti prestabiliti sono linearmente dipendenti, essendo paralleli.
Abbiamo dunque trovato il triangolo di coordinate

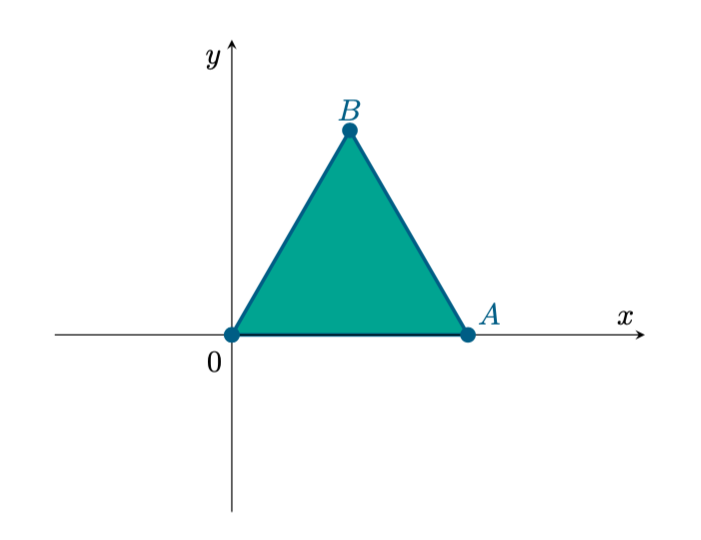
Figura 57: il triangolo è equilatero.
Notiamo che esse individuano un triangolo equilatero di perimetro , infatti i lati hanno lunghezza uguale



e perimetro assegnato, avendo

Svolgimento 2.
 , allora vale
, allora vale
![\begin{equation*} \sqrt[n]{x_1\cdot...\cdot x_n}\leq\dfrac{x_1+...+x_n}{n}, \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7f52836cf2011885b32a6b13507b392e_l3.svg "Rendered by QuickLaTeX.com")
con l’uguaglianza che sussiste se e solo se  .
.
Consideriamo allora un triangolo di perimetro e, detti , e le lunghezze dei suoi lati, risulta  .
.
Ricordiamo, infine, la formula di Erone, che esprime l’area di un triangolo in funzione del perimetro e dei suoi lati:

Utilizziamo allora la disuguaglianza precedente con  ,
,  ,
,  e
e  , ottenendo
, ottenendo
![\begin{equation*} \sqrt[3]{(p-x)(p-y)(p-z)}\leq \dfrac{p-x+p-y+p-z}{3}=\dfrac{p}{3}. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f19a915bce6389c0c7a3a83d53bfc6b1_l3.svg "Rendered by QuickLaTeX.com")
D’altra parte,
![\begin{equation*} \sqrt[3]{(p-x)(p-y)(p-z)}=\sqrt[3]{\dfrac{\mathcal{A}(x,y,z)^2}{p}}, \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9d486fcfbc8e24f5923abc921053ac1e_l3.svg "Rendered by QuickLaTeX.com")
da cui

Osserviamo infine che l’uguaglianza e quindi il valore di area massima, si ottiene solamente se  , ovvero se il triangolo è equilatero.
, ovvero se il triangolo è equilatero.
 . Data la funzione definita da
. Data la funzione definita da
![\[f(x,y,z):=x-2y+z,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-110bee396af3543240408bce6d218234_l3.svg "Rendered by QuickLaTeX.com")
determinare, se esistono, il massimo e il minimo di sull’insieme
![\[A:=\{(x,y,z)\in\mathbb{R}^3\mid x^2+z^2\leq y\leq 1\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-986a93275bbb5bd03e4ae2078266bae1_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento.
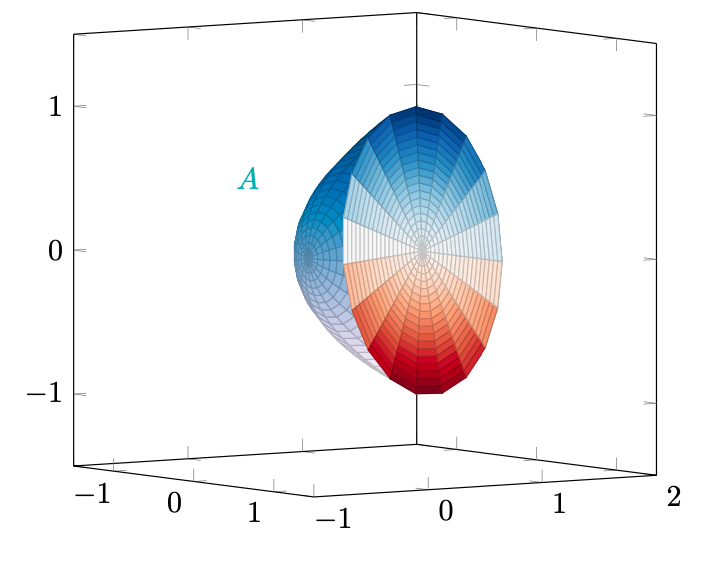
Figura 58: l’insieme .
Osserviamo che è un polinomio, pertanto è una funzione continua su , mentre l’insieme è chiuso e limitato. La chiusura segue dal fatto che è intersezione di controimmagini di insiemi chiusi di tramite funzioni continue, infatti possiamo scrivere nel seguente modo:

le funzioni  e
e  sono funzioni continue e gli intervalli
sono funzioni continue e gli intervalli ![(-\infty,0]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-6cce89ff44e7b37d64bf73be534acd4b_l3.svg "Rendered by QuickLaTeX.com") ,
, ![[0,1]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-dc4967ae348e5f5a8f8552109bbb794a_l3.svg "Rendered by QuickLaTeX.com") sottoinsiemi chiusi di , per cui si verifica
sottoinsiemi chiusi di , per cui si verifica ![A=h^{-1}_1((-\infty,0])\cap h^{-1}_2([0,1])](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-47f1634e364bd8d8bc1f2d7a51f4184d_l3.svg "Rendered by QuickLaTeX.com") . Per la limitatezza, osserviamo che ciascun punto soddisfa
. Per la limitatezza, osserviamo che ciascun punto soddisfa

da cui è contenuto in una sfera di raggio  . Dunque è un chiuso e limitato di , compatto per il teorema di Heine-Borel. Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
. Dunque è un chiuso e limitato di , compatto per il teorema di Heine-Borel. Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
Distinguiamo l’insieme nella sua parte interna e la sua frontiera: . Studiamo separatamente e in maniera differente le due componenti.
Essendo differenziabile sull’insieme aperto , il teorema di Fermat ci assicura che gli estremi relativi di in vanno ricercati tra i suoi eventuali punti critici in , ovvero i punti tali che e scartare tutti i punti che non soddisfano tale condizione. Osserviamo tuttavia che , in qualità di funzione lineare, non ammette punti critici. Pertanto, lo studio di non comporta alcun punto da annotare.
Possiamo descrivere come unione di due componenti, ovvero , con


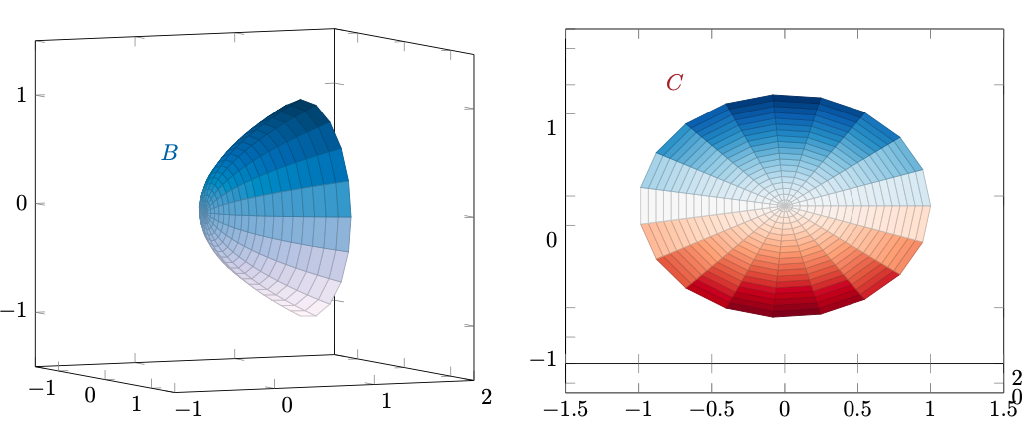
Figura 59: e , le due componenti della frontiera di .
Al fine di risolvere l’esercizio è utile trovare una parametrizzazione regolare per ciascuna delle componenti,  e
e  e studiare le funzioni composte
e studiare le funzioni composte  e
e  .
.
) È immediato osservare che è unione di circonferenze parallele al piano  di raggio , dunque una sua possibile parametrizzazione è la seguente:
di raggio , dunque una sua possibile parametrizzazione è la seguente:
![\begin{equation*} \psi_B:[0,1]\times[0,2\pi]\rightarrow\mathbb{R}^3 \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d35f705ef782d93041ef376c9980d259_l3.svg "Rendered by QuickLaTeX.com")

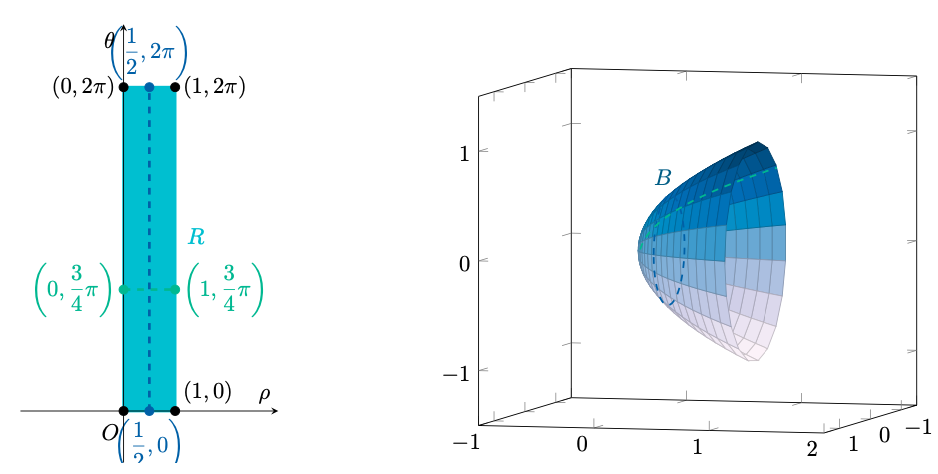
Figura 60: la parametrizzazione di con rappresentazione di alcune linee coordinate.
Sia ![R:=[0,1]\times[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2afcb8c0177028dcd071d79aadbb6b73_l3.svg "Rendered by QuickLaTeX.com") il dominio della parametrizzazione e
il dominio della parametrizzazione e  la sua parte interna. è una parametrizzazione regolare di poiché
la sua parte interna. è una parametrizzazione regolare di poiché  è iniettiva e di classe su ,
è iniettiva e di classe su ,  su ed infine vale
su ed infine vale
![\[\psi_B(R)=B.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e6b39104c65f30d1892cc54b22153b82_l3.svg "Rendered by QuickLaTeX.com")
Osserviamo che sia sia sono funzioni continue, dunque lo è anche la loro composizione. Infine, è un chiuso e limitato di , dunque compatto. Per il teorema di Weierstrass, esisteranno il massimo ed il minimo di su . Per trovarli, distinguiamo nuovamente l’insieme nella sua parte interna, e la sua frontiera, formata dai 4 lati del rettangolo.
Per quanto riguarda l’insieme aperto , essendo una funzione differenziabile, il teorema di Fermat afferma che condizione necessaria affinchè sia un punto di massimo o di minimo è che  . Calcoliamo allora il gradiente di tramite le derivate parziali:
. Calcoliamo allora il gradiente di tramite le derivate parziali:

![\[\begin{cases} \dfrac{\partial (f\circ\psi_B)}{\partial \rho}(\rho,\theta)=\cos\theta+\sin\theta-4\rho\\\\ \dfrac{\partial (f\circ\psi_B)}{\partial \theta}(\rho,\theta)=-\rho\sin\theta+\rho\cos\theta. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-80d133741528d148833d4a14bdd2c9a8_l3.svg "Rendered by QuickLaTeX.com")
Dunque
(5) 
Poiché su , , la seconda equazione si annulla solamente se  , cioè per
, cioè per  ,
,  . Dalla prima equazione risulta
. Dalla prima equazione risulta

che possiamo accettare solo con segno positivo. Abbiamo trovato il punto critico di :

a cui corrisponde il punto su

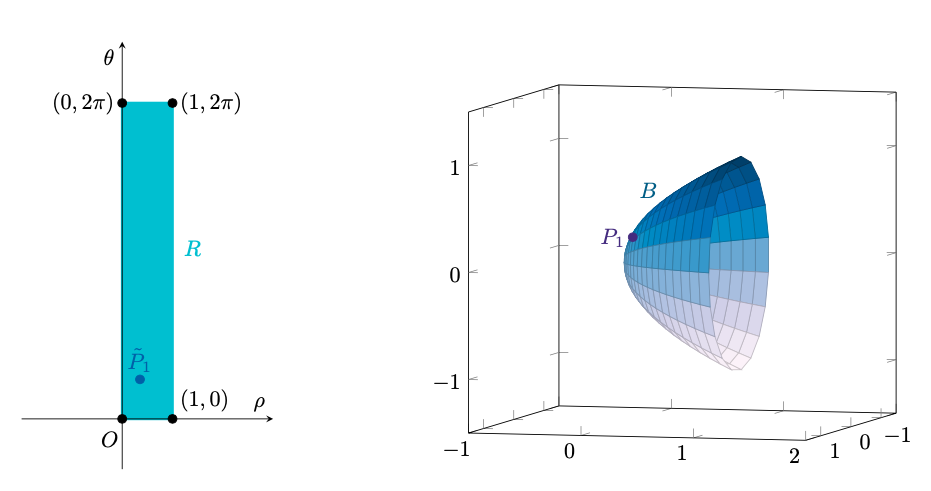
Figura 61: è l’unico punto critico di . Il suo corrispondente punto su è  .
.
Per quanto riguarda la frontiera , essa è composta dai lati e , come mostrato in figura. Notiamo, tuttavia, che non è necessario studiare su e , i lati corrispondenti ai valori di , , poichè la funzione è -periodica rispetto a . Infatti, avremmo potuto parametrizzare tramite ![\psi_B':[0,1]\times[-\pi,\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9cb4018703ff2cb570e0686725655178_l3.svg "Rendered by QuickLaTeX.com") , con
, con  , laddove entrambe definite. In tal modo la parte di frontiera relativa a non avrebbe svolto alcun ruolo nella ricerca dei massimi e minimi di su . Lo stesso discorso vale analogamente per .
, laddove entrambe definite. In tal modo la parte di frontiera relativa a non avrebbe svolto alcun ruolo nella ricerca dei massimi e minimi di su . Lo stesso discorso vale analogamente per .
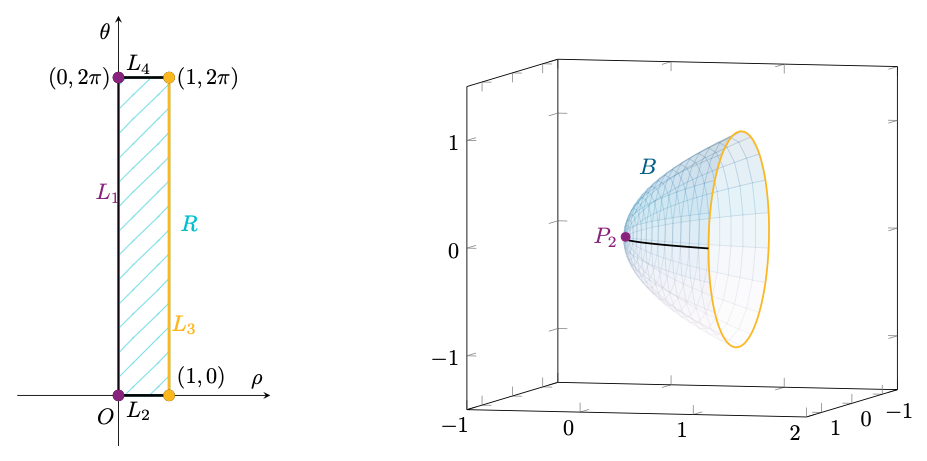
Figura 62: studio di  attraverso la sua parametrizzazione. Basterà studiare i lati e
attraverso la sua parametrizzazione. Basterà studiare i lati e  .
.
Il lato , corrispondente al settore viene parametrizzato da
![\begin{equation*} \begin{array}{rcl} \alpha_1:[0,2\pi] & \rightarrow&\mathbb{R}^2 \\ t&\mapsto&(0,t) \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4a5d5f4e31ddf4a5742de589a000f8bf_l3.svg "Rendered by QuickLaTeX.com")
e

Ciò significa che è costante su ![L_1=\{0\}\times[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e66289600e8ec4f687eed20fc44f3fbb_l3.svg "Rendered by QuickLaTeX.com") che risulta quindi un insieme di punti critici per , a cui corrisponde su il solo punto
che risulta quindi un insieme di punti critici per , a cui corrisponde su il solo punto  , che denotiamo con .\\
Per quanto riguarda
, che denotiamo con .\\
Per quanto riguarda ![L_3=\{1\}\times[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-53dc85195401827e88222f7f74f29bfd_l3.svg "Rendered by QuickLaTeX.com") , parametrizzato da
, parametrizzato da
![\begin{equation*} \begin{array}{rcl} \alpha_3:[0,2\pi] & \rightarrow&\mathbb{R}^2 \\ t&\mapsto&(1,t). \end{array} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-aa18f9441dc1f6496cd92e2637d230b9_l3.svg "Rendered by QuickLaTeX.com")
calcoliamo  e i suoi punti critici.
e i suoi punti critici.


Dunque i punti critici di  , ovvero i punti che annullano la sua derivata prima, sono i valori di per cui vale
, ovvero i punti che annullano la sua derivata prima, sono i valori di per cui vale

cioè per  e
e  . Troviamo dunque i punti
. Troviamo dunque i punti
![\[\Tilde{P}_3=\left(1,\dfrac{\pi}{4}\right),\qquad \Tilde{P}_4=\left(1,\dfrac{5}{4}\pi\right),\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-77d34821659bf44ac5b9efa4e82b1e53_l3.svg "Rendered by QuickLaTeX.com")
a cui corrispondono su i punti

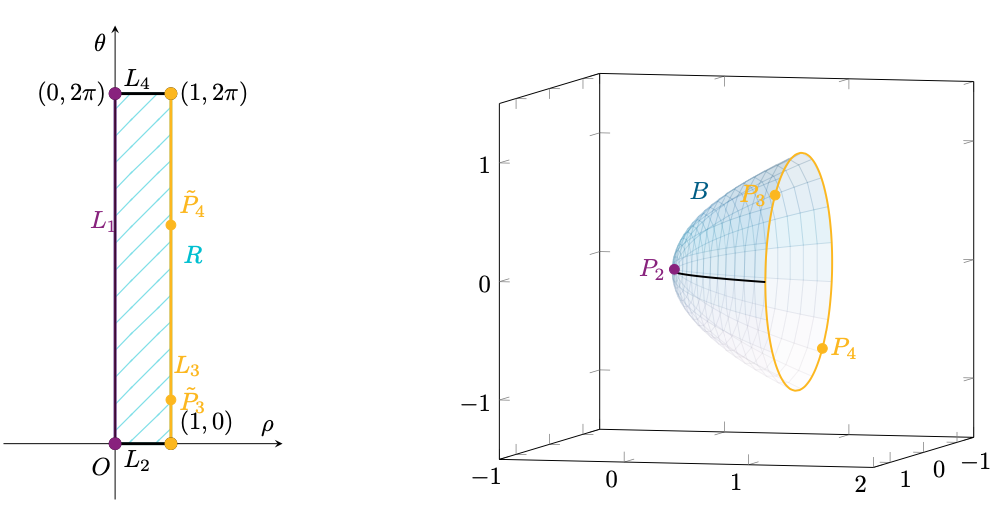
Figura 63: e corrispondono a punti critici su e il punto è immagine del lato .
Questo conclude lo studio di su che ha portato alla nostra attenzione candidati ad essere punti di massimo o di minimo di su : i punti e .
) Osserviamo immediatamente che è un cerchio di raggio  a quota
a quota  . Pertanto esso è parametrizzabile da
. Pertanto esso è parametrizzabile da


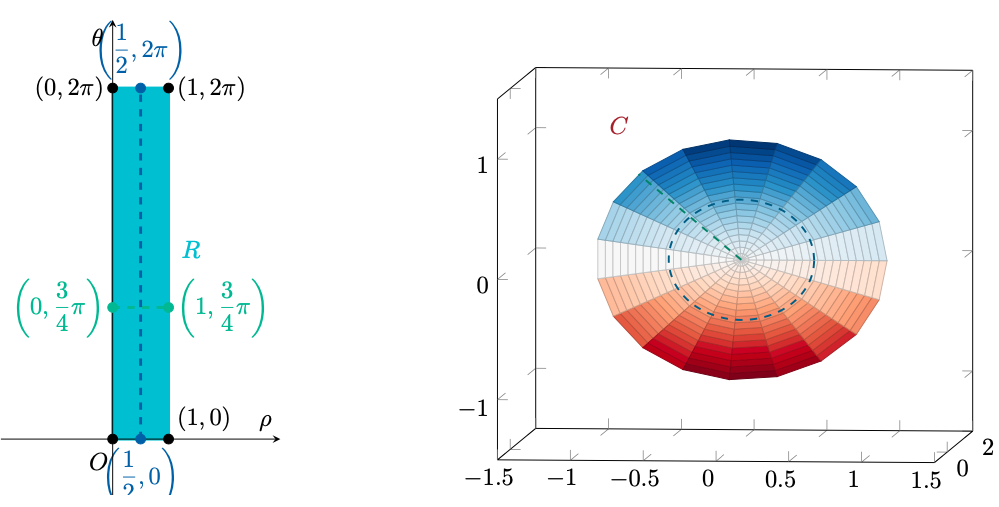
Figura 64: la parametrizzazione di , con alcune linee coordinate.
Calcoliamo :

Analogamente a quanto detto in precedenza, anche per il teorema di Weierstrass garantisce l’esistenza del massimo e del minimo su . Studiamo inizialmente il comportamento di sull’insieme aperto tramite la ricerca dei punti critici, per poi studiare su .
Calcoliamo le derivate parziali di :
![\[\begin{cases} \dfrac{\partial (f\circ\psi_C)}{\partial \rho}(\rho,\theta)=\cos\theta+\sin\theta\\\\ \dfrac{\partial (f\circ\psi_C)}{\partial \theta}(\rho,\theta)=-\rho\sin\theta+\rho\cos\theta. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d1ee9fdd843ec2f7dca41eb9a45bebc2_l3.svg "Rendered by QuickLaTeX.com")
Dunque
(6) 
ma questo sistema non ha soluzioni: ciò significa che non ci sono punti critici di su . Per quanto riguarda , poichè anche è -periodica rispetto a , lo stesso discorso fatto in precedenza ci autorizza ad ignorare i lati corrispondenti ai valori e . I lati rimasti sono ![M_1=\{0\}\times[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-6ef2b253194f4d78b650be3d53054a35_l3.svg "Rendered by QuickLaTeX.com") e
e ![M_3=\{1\}\times[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9f04ab2859c35bdefc65c6b74deebbab_l3.svg "Rendered by QuickLaTeX.com") . Osserviamo tuttavia che
. Osserviamo tuttavia che  , dunque annotiamo per semplicità
, dunque annotiamo per semplicità  tra i possibili candidati.
tra i possibili candidati.
Infine, per quanto riguarda , osserviamo che  , che abbiamo ampiamente studiato in precedenza.
, che abbiamo ampiamente studiato in precedenza.
Questo conclude lo studio di .
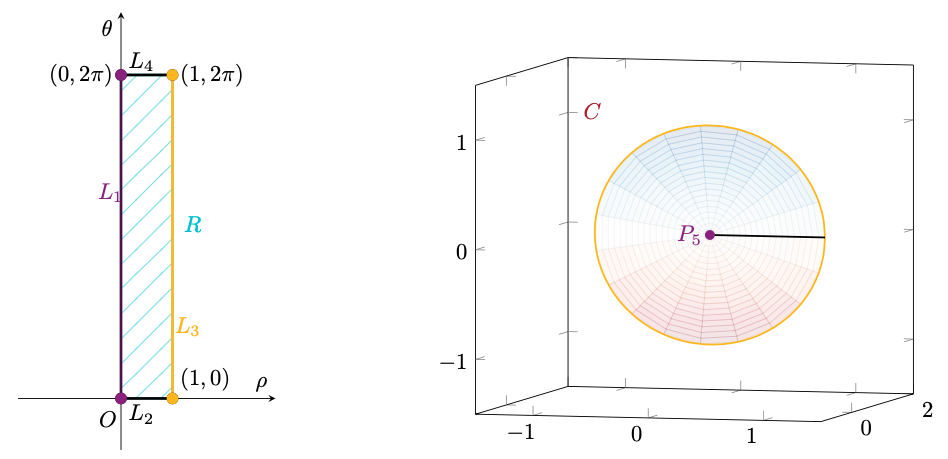
Figura 65: studio della frontiera di . Anche in questo caso, i lati e non svolgono alcun ruolo.
I possibili candidati ad essere punti di massimo o di minimo di su sono i seguenti

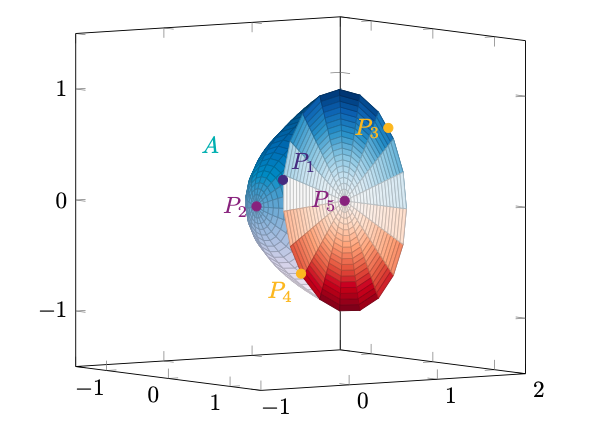
Figura 66: tutti i candidati ad essere punti di massimo o minimo di su .
i cui valori rispetto a sono

ha massimo su pari a  , assunto nel punto
, assunto nel punto  e valore minimo
e valore minimo  , assunto in
, assunto in  .
. Data la funzione definita da
.
. Data la funzione definita da
![\[f(x,y,z):=x^3+y^3+z^3,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2a695dbe679a092a62e72df996add3cd_l3.svg "Rendered by QuickLaTeX.com")
determinare, se esistono, il massimo e il minimo di sull’insieme
![\[A:=\{(x,y,z)\in\mathbb{R}^3\mid x^2+y^2-z^2=1, \ x+y=1, \ -2\leq z\leq 2\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-351f4db48ecc3b84829712a2886742d5_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento.
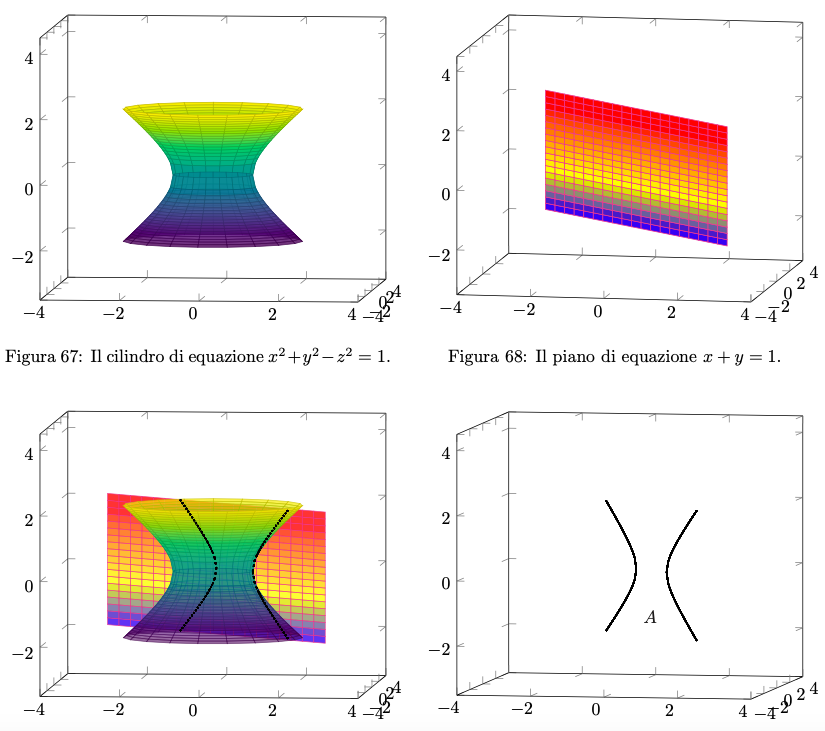
Figura 69: l’insieme , in nero, ottenuto come intersezione tra il cilindro e il piano, con vincolo  .
.
Osserviamo che è un polinomio, pertanto è una funzione continua su , mentre l’insieme è chiuso e limitato. La chiusura segue dal fatto che è intersezione di controimmagini di insiemi chiusi di tramite funzioni continue, la limitatezza dalle equazioni che definiscono . Infatti, per ipotesi ![z\in[-2,2]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9c70ab4d74c98dd75ac0a032d9f5972c_l3.svg "Rendered by QuickLaTeX.com") , mentre dalla prima equazione risulta
, mentre dalla prima equazione risulta

da cui possiamo affermare che l’insieme è contenuto in una sfera di raggio  , in particolare è un insieme limitato. Abbiamo dunque trovato che è un chiuso e limitato di , compatto per il teorema di Heine-Borel. Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
, in particolare è un insieme limitato. Abbiamo dunque trovato che è un chiuso e limitato di , compatto per il teorema di Heine-Borel. Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
Osserviamo che , ovvero è un insieme chiuso che coincide con la sua frontiera. È utile, tuttavia, separare tramite le due componenti


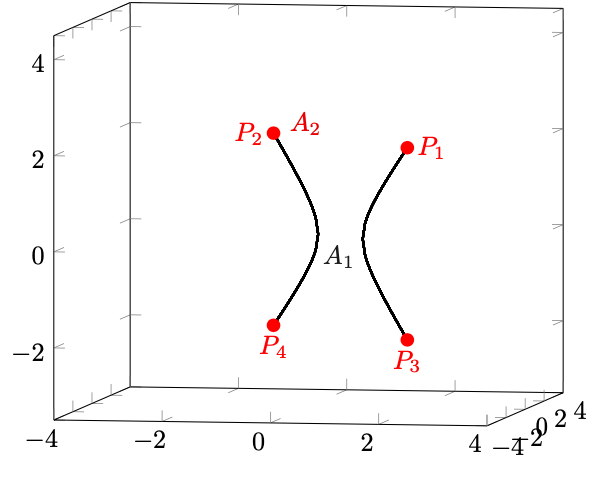
Figura 70: raffigurati i due insiemi che formano :  in nero e
in nero e  composto dai 4 punti rossi.
composto dai 4 punti rossi.
da cui risulta

Ricerchiamo i punti di massimo e minimo di su attraverso il metodo dei moltiplicatori di Lagrange, mentre indaghiamo in maniera diretta, essendo unione di punti isolati, come vedremo. Osserviamo che il vincolo si può esprimere come intersezione di luogo di zeri di due funzioni: siano  definite da
definite da


Detti

e

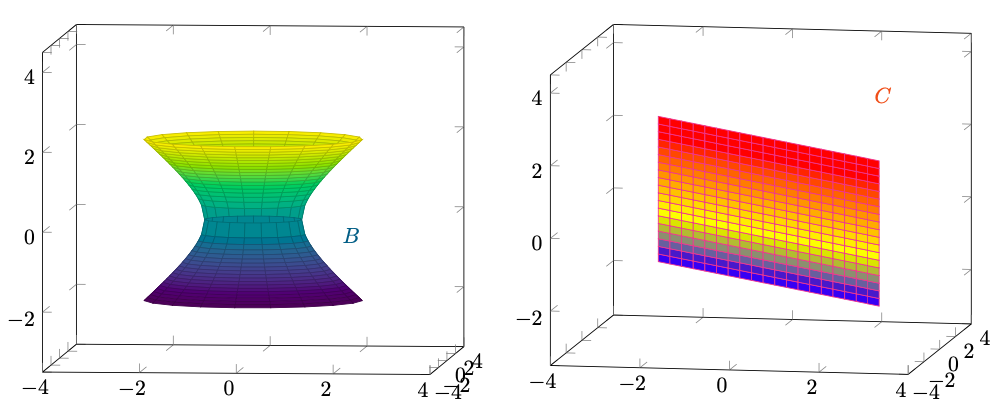
Figura 71: si applica il metodo dei moltiplicatori di Lagrange ai vincoli e , la cui intersezione è il vincolo effettivo.
vale

Il metodo dei moltiplicatori di Lagrange ci induce a studiare la funzione Lagrangiana
![\[\mathcal{L}(x,y,z,\lambda,\mu):=f(x,y,z)-\lambda g(x,y,z)-\mu h(x,y,z)\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7bd4a1bb5a6b7075812919e09cccf704_l3.svg "Rendered by QuickLaTeX.com")
e ricercare i suoi punti critici non vincolati. Infatti, per il teorema dei moltiplicatori di Lagrange, ad essi corrisponderanno i punti critici vincolati di su . Dovremo dunque risolvere il sistema
Nel nostro caso

i cui punti critici devono soddisfare il sistema

Sostituiamo nella prima riga la differenza tra le prime due equazioni e utilizziamo il prodotto notevole  :
:
![\begin{equation*} \left\{\begin{array}{l} 3(x^2-y^2)+2\lambda(x-y)=0 \\\\ 3y^2+2\lambda y+\mu=0 \\\\ (3z-2\lambda) z=0 \\\\ x^2+y^2-z^2=1 \\\\ x+y=1 \\\\ \end{array}\right.\Leftrightarrow\left\{\begin{array}{l} (x-y)\left[3(x+y)+2\lambda\right]=0 \\\\ 3y^2+2\lambda y+\mu=0 \\\\ (3z-2\lambda) z=0 \\\\ x^2+y^2-z^2=1 \\\\ x+y=1 \\\\ \end{array}\right.\Leftrightarrow\left\{\begin{array}{l} (x-y)\left(3+2\lambda\right)=0 \\\\ 3y^2+2\lambda y+\mu=0 \\\\ (3z-2\lambda) z=0 \\\\ x^2+y^2-z^2=1 \\\\ x+y=1, \\\\ \end{array}\right. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-32b92bf86949b40141dea5e65ea26377_l3.svg "Rendered by QuickLaTeX.com")
dove abbiamo utilizzato l’equazione  per semplificare la prima equazione.
Osserviamo che la terza equazione si annulla solamente se o
per semplificare la prima equazione.
Osserviamo che la terza equazione si annulla solamente se o  . Supponiamo prima , da cui il sistema risulta
. Supponiamo prima , da cui il sistema risulta

Abbiamo allora trovato i primi due punti interessanti:  e
e  .
.
Supponendo, invece, , il sistema diventa

La prima equazione si annulla solo se  o
o  . Se fosse , l’ultima equazione implicherebbe
. Se fosse , l’ultima equazione implicherebbe  , ma dalla quarta equazione avremmo
, ma dalla quarta equazione avremmo

che è chiaramente impossibile. Se, invece, , focalizziamoci ancora sulle ultime due equazioni del sistema che si riducono a

Ricavando  , otteniamo l’equazione in funzione della sola variabile
, otteniamo l’equazione in funzione della sola variabile

da cui

Abbiamo quindi trovato altri 2 punti da considerare:

Questo conclude lo studio di .
Occupiamoci ora di e osserviamo che è composto da punti isolati. Infatti, dalle equazioni che definiscono , troviamo

Sostituiamo nella prima equazione per trovare :

da cui si trova

Pertanto,

dove

Abbiamo trovato otto candidati ad essere punti di massimo e di minimo di su .
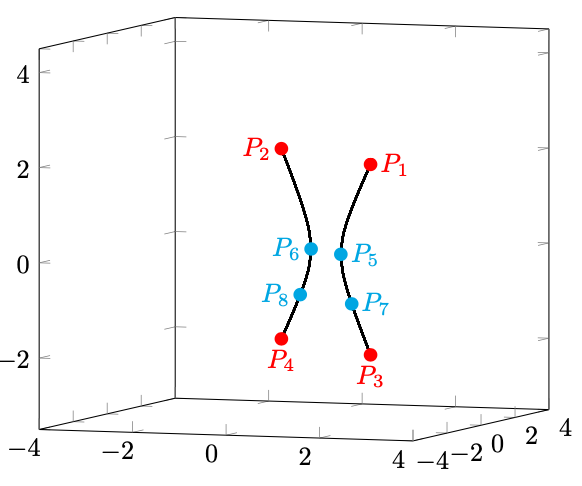
Figura 72: tutti i candidati ad essere punti di massimo o minimo di su .
Calcoliamo i loro valori tramite e confrontiamoli:

ha massimo su pari a  , assunto nei punti
, assunto nei punti  e
e  valore minimo , assunto nei punti
valore minimo , assunto nei punti  e
e  .
. Data la funzione definita da
.
. Data la funzione definita da
![\[f(x,y,z):=z-x,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-663f303b2ccd17ca7c561df6da18271f_l3.svg "Rendered by QuickLaTeX.com")
determinare, se esistono, il massimo e il minimo di sull’insieme
![\[A:=\{(x,y,z)\in\mathbb{R}^3\mid x^2+y^2+z=1, \ x^2+z^2=3\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d0bb0d76e10436aed7ac26700ab2b09d_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento.

Figura 73: tratteggiato, in nero, l’insieme , ottenuto come intersezione tra un cilindro e un paraboloide.
Osserviamo che è un polinomio, pertanto è una funzione continua su , mentre l’insieme è chiuso e limitato. La chiusura segue dal fatto che è intersezione di controimmagini di insiemi chiusi di tramite funzioni continue, la limitatezza dalle equazioni che definiscono . Infatti, dalla seconda condizione possiamo immediatamente affermare che ![x,z\in[-3,3]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-0f67847b02a45e04ab3cbb9c0c3b2bcd_l3.svg "Rendered by QuickLaTeX.com") , da cui
, da cui ![x^2\in[0,9]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8f26e90987d563e75884e7e7c0761388_l3.svg "Rendered by QuickLaTeX.com") , pertanto dalla prima equazione possiamo ottenere una stima di :
, pertanto dalla prima equazione possiamo ottenere una stima di :
![\begin{equation*} y^2=1-x^2-z\in[-11,4], \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9895c38b5fde889d199425d0c3d7c251_l3.svg "Rendered by QuickLaTeX.com")
da cui ![y\in[-2,2]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-41bcc65f225d473a5b59e4098845dd11_l3.svg "Rendered by QuickLaTeX.com") . Abbiamo trovato che ciascun punto in dev’essere contenuto in un parallelepipedo di centro l’origine e lati
. Abbiamo trovato che ciascun punto in dev’essere contenuto in un parallelepipedo di centro l’origine e lati  e
e  , a sua volta contenuto in una sfera di raggio
, a sua volta contenuto in una sfera di raggio  . Ciò dimostra la limitatezza di . Abbiamo dunque trovato che è un chiuso e limitato di , compatto per il teorema di Heine-Borel. Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
. Ciò dimostra la limitatezza di . Abbiamo dunque trovato che è un chiuso e limitato di , compatto per il teorema di Heine-Borel. Possiamo allora applicare il teorema di Weierstrass, il quale garantisce l’esistenza del massimo e del minimo di su .
Osserviamo che , ovvero è un insieme chiuso che coincide con la sua frontiera. Ricerchiamo i punti di massimo e minimo di su attraverso il metodo dei moltiplicatori di Lagrange. Osserviamo che il vincolo si può esprimere come intersezione di luogo di zeri di due funzioni: siano definite da


Detti

e

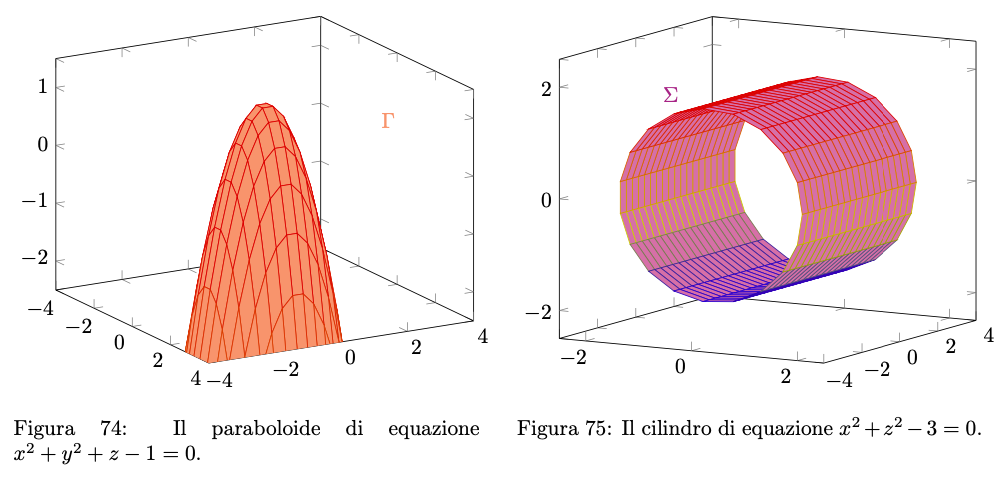
vale

Il teorema dei moltiplicatori di Lagrange afferma che in corrispondenza dei punti di massimo o minimo di su , che non siano punti critici dei vincoli ed , i gradienti delle funzioni , e risultano complanari. Ciò significa che, se è punto di massimo o minimo di su e tale che  , esistono tali che
, esistono tali che

È conveniente, al fine di utilizzare questo metodo risolutivo, costruire direttamente la funzione Lagrangiana
e ricercare i suoi punti critici non vincolati. Ad essi corrisponderanno i punti critici vincolati di su . Dovremo dunque risolvere il sistema
Nel nostro caso

i cui punti critici devono soddisfare il sistema

Osserviamo che la seconda equazione si annulla solamente se o . Supponiamo inizialmente , allora il sistema diventa

Confrontando tra loro la prima e la terza equazione, dovrà necessariamente risultare  . Inserendo quest’informazione nell’ultima equazione del sistema, troviamo
. Inserendo quest’informazione nell’ultima equazione del sistema, troviamo

Osserviamo che la soluzione  non è accettabile, poiché risulterebbe
non è accettabile, poiché risulterebbe  , ma dalla quarta equazione sappiamo sicuramente che
, ma dalla quarta equazione sappiamo sicuramente che  . Risolviamo il sistema per
. Risolviamo il sistema per  e
e  , trovando dalla quarta equazione
, trovando dalla quarta equazione

Per completezza, troviamo il moltiplicatore di Lagrange :

Abbiamo trovato i primi punti critici della Lagrangiana
![\[\left(\sqrt{\dfrac{3}{2}},\sqrt{\sqrt{\dfrac{3}{2}}-\dfrac{1}{2}},-\sqrt{\dfrac{3}{2}},0,\dfrac{1}{\sqrt{6}}\right),\qquad\left(\sqrt{\dfrac{3}{2}},-\sqrt{\sqrt{\dfrac{3}{2}}-\dfrac{1}{2}},-\sqrt{\dfrac{3}{2}},0,\dfrac{1}{\sqrt{6}}\right),\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-fed91dd0ff648389ac9d20a4023cc34f_l3.svg "Rendered by QuickLaTeX.com")
a cui corrispondono i punti su

Supponendo, invece , possiamo restringere la nostra attenzione alle ultime due equazioni del sistema per trovare le altre due variabili:

per confronto tra le due equazioni troviamo

ovvero

Il valore  non comporta alcuna soluzione reale per
non comporta alcuna soluzione reale per  , per cui verrà eslcuso, mentre per otteniamo
, per cui verrà eslcuso, mentre per otteniamo  , ovvero i punti
, ovvero i punti

corrispondenti ai punti critici della Lagrangiana

Abbiamo trovato quattro candidati ad essere punti di massimo e di minimo di su .
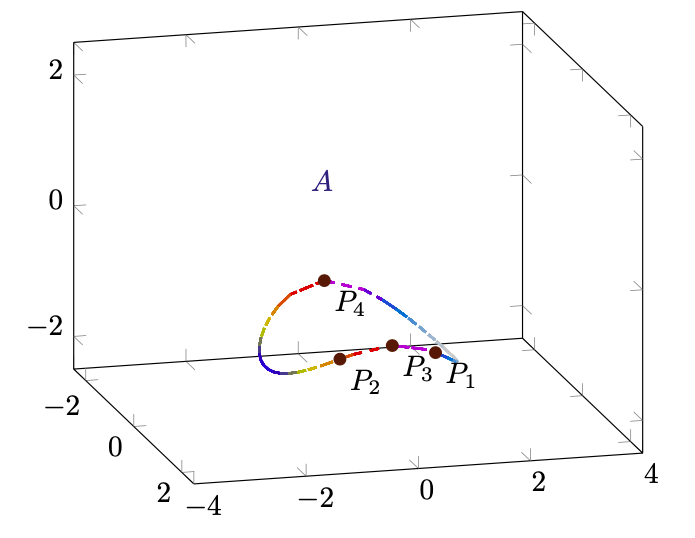
Figura 76: tutti i punti candidati ad essere punti di massimo o minimo di su .
Mostriamo che, come prevede il teorema dei moltiplicatori di Lagrange, i gradienti di , e sono complanari nei punti precedentemente trovati:
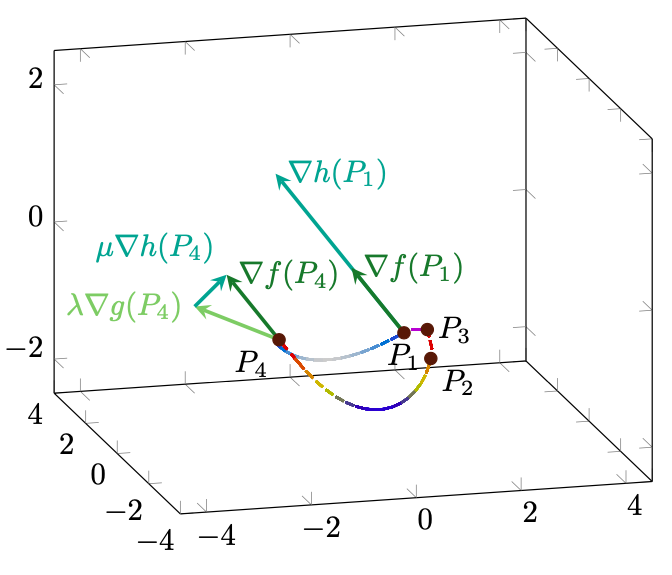
Figura 77: vi è una differenza tra e : in i gradienti di e sono paralleli, mentre in sono complanari assieme al gradiente di . Ciò significa che sarebbe da considerare anche nella ricerca di massimi e minimi di sulla superficie  , mentre solo in relazione al vincolo più restrittivo
, mentre solo in relazione al vincolo più restrittivo  .
.
Calcoliamo i loro valori tramite e confrontiamoli:

ha massimo su pari a  , assunto nel punto
, assunto nel punto  e valore minimo
e valore minimo  , assunto nei punti
, assunto nei punti  e
e  .
.
Tutta la teoria di analisi matematica
Leggi...
- Teoria Insiemi
- Il metodo della diagonale di Cantor
- Logica elementare
- Densità dei numeri razionali nei numeri reali
- Insiemi Numerici

- Il principio di induzione
- Gli assiomi di Peano
- L’insieme dei numeri reali: costruzione e applicazioni
- Concetti Fondamentali della Retta Reale: Sintesi Teorica
- Costruzioni alternative di
- Binomio di Newton
- Spazi metrici, un’introduzione
- Disuguaglianza di Bernoulli
- Disuguaglianza triangolare
- Teoria sulle funzioni
- Funzioni elementari: algebriche, esponenziali e logaritmiche
- Funzioni elementari: trigonometriche e iperboliche
- Funzioni goniometriche: la guida essenziale
- Teorema di Bolzano-Weierstrass per le successioni
- Criterio del rapporto per le successioni
- Definizione e proprietà del numero di Nepero
- Limite di una successione monotona
- Successioni di Cauchy
- Il teorema ponte
- Teoria sui limiti
- Simboli di Landau
- Funzioni continue – Teoria
- Il teorema di Weierstrass
- Il teorema dei valori intermedi
- Il teorema della permanenza del segno
- Il teorema di Heine-Cantor
- Il teorema di esistenza degli zeri
- Il metodo di bisezione
- Teorema ponte versione per le funzioni continue
- Discontinuità di funzioni monotone
- Continuità della funzione inversa
- Teorema delle contrazioni o Teorema di punto fisso di Banach-Caccioppoli
- Teoria sulle derivate
- Calcolo delle derivate: la guida pratica
- Teoria sulle funzioni convesse
- Il teorema di Darboux
- I teoremi di de l’Hôpital
- Teorema di Fermat
- Teoremi di Rolle e Lagrange
- Il teorema di Cauchy
- Espansione di Taylor: teoria, esempi e applicazioni pratiche
- Polinomi di Taylor nei limiti: istruzioni per l’uso
- Integrali definiti e indefiniti
- Teorema fondamentale del calcolo integrale (approfondimento)
- Integrali ricorsivi
- Formule del trapezio, rettangolo e Cavalieri-Simpson
- Teoria sugli integrali impropri
- Funzioni integrali – Teoria
- Introduzione ai numeri complessi – Volume 1 (per un corso di ingegneria — versione semplificata)
- Introduzione ai numeri complessi – Volume 1 (per un corso di matematica o fisica)
- Serie numeriche: la guida completa
- Successioni di funzioni – Teoria
- Teoremi sulle successioni di funzioni
- Serie di funzioni – Teoria
- Serie di potenze – Teoria
- Serie di Fourier – Teoria e applicazioni
- Integrali multipli — Parte 1 (teoria)
- Integrali multipli — Parte 2 (teoria e esercizi misti)
- Regola della Catena — Teoria ed esempi.
- Jacobiano associato al cambiamento di coordinate sferiche
- Guida ai Massimi e Minimi: Tecniche e Teoria nelle Funzioni Multivariabili
- Operatore di Laplace o Laplaciano
- Teoria equazioni differenziali
- Equazione di Eulero
- Teoria ed esercizi sulla funzione Gamma di Eulero
- Teoria ed esercizi sulla funzione Beta
- Approfondimento numeri complessi
- Diverse formulazioni dell’assioma di completezza
- Numeri di Delannoy centrali
- Esercizi avanzati analisi
Tutte le cartelle di Analisi Matematica
Leggi...
- Prerequisiti di Analisi
- Successioni
- Funzioni
- Funzioni continue-lipschitziane-holderiane
- Calcolo differenziale
- Derivate
- Calcolo delle derivate
- Retta tangente nel calcolo differenziale
- Punti di non derivabilità nel calcolo differenziale
- Esercizi sul teorema di Weierstrass con l’uso delle derivate
- Studio di funzione completo nel calcolo differenziale
- Esercizi teorici nel calcolo differenziale
- Metodo di bisezione
- Metodo di Newton
- Teoremi del calcolo differenziale
- Calcolo integrale
- Integrali impropri
- Espansione di Taylor
- Funzioni integrali (Approfondimento)
- Numeri Complessi
- Serie numeriche
- Successioni di funzioni
- Serie di funzioni
- Serie di potenze
- Serie di Fourier
- Trasformata di Fourier
- Funzioni di più variabili
- Teoria Funzioni di più variabili
- Massimi e minimi liberi e vincolati
- Limiti in due variabili
- Integrali doppi
- Integrali tripli
- Integrali di linea di prima specie
- Integrali di linea di seconda specie
- Forme differenziali e campi vettoriali
- Teorema di Gauss-Green
- Integrali di superficie
- Flusso di un campo vettoriale
- Teorema di Stokes
- Teorema della divergenza
- Campi solenoidali
- Teorema del Dini
- Equazioni differenziali lineari e non lineari
- Equazioni differenziali lineari
- Equazioni differenziali non lineari
- Analisi complessa
- Fondamenti
- Funzioni olomorfe
- Integrale di Cauchy e applicazioni
- Teorema della curva di Jordan e teorema fondamentale dell’Algebra
- Teorema di inversione di Lagrange
- Teorema dei Residui
- Funzioni meromorfe
- Prodotti infiniti e prodotti di Weierstrass
- Continuazione analitica e topologia
- Teoremi di rigidità di funzioni olomorfe
- Trasformata di Mellin
- Equazioni alle derivate parziali
- Funzioni speciali
- Analisi funzionale
- Complementi
- Funzioni Convesse
Tutti gli esercizi di geometria
In questa sezione vengono raccolti molti altri esercizi che coprono tutti gli argomenti di geometria proposti all’interno del sito con lo scopo di offrire al lettore la possibilità di approfondire e rinforzare le proprie competenze inerenti a tali argomenti.
Algebra lineare.
Geometria analitica.
Geometria differenziale.
Risorse didattiche aggiuntive per approfondire la matematica
Leggi...
- Math Stack Exchange – Parte della rete Stack Exchange, questo sito è un forum di domande e risposte specificamente dedicato alla matematica. È una delle piattaforme più popolari per discutere e risolvere problemi matematici di vario livello, dall’elementare all’avanzato.
- Art of Problem Solving (AoPS) – Questo sito è molto noto tra gli studenti di matematica di livello avanzato e i partecipanti a competizioni matematiche. Offre forum, corsi online, e risorse educative su una vasta gamma di argomenti.
- MathOverflow – Questo sito è destinato a matematici professionisti e ricercatori. È una piattaforma per domande di ricerca avanzata in matematica. È strettamente legato a Math Stack Exchange ma è orientato a un pubblico con una formazione più avanzata.
- PlanetMath – Una comunità collaborativa di matematici che crea e cura articoli enciclopedici e altre risorse di matematica. È simile a Wikipedia, ma focalizzata esclusivamente sulla matematica.
- Wolfram MathWorld – Una delle risorse online più complete per la matematica. Contiene migliaia di articoli su argomenti di matematica, creati e curati da esperti. Sebbene non sia un forum, è una risorsa eccellente per la teoria matematica.
- The Math Forum – Un sito storico che offre un’ampia gamma di risorse, inclusi forum di discussione, articoli e risorse educative. Sebbene alcune parti del sito siano state integrate con altri servizi, come NCTM, rimane una risorsa preziosa per la comunità educativa.
- Stack Overflow (sezione matematica) – Sebbene Stack Overflow sia principalmente noto per la programmazione, ci sono anche discussioni rilevanti di matematica applicata, specialmente nel contesto della scienza dei dati, statistica, e algoritmi.
- Reddit (r/Math) – Un subreddit popolare dove si possono trovare discussioni su una vasta gamma di argomenti matematici. È meno formale rispetto ai siti di domande e risposte come Math Stack Exchange, ma ha una comunità attiva e molte discussioni interessanti.
- Brilliant.org – Offre corsi interattivi e problemi di matematica e scienza. È particolarmente utile per chi vuole allenare le proprie capacità di problem solving in matematica.
- Khan Academy – Una risorsa educativa globale con lezioni video, esercizi interattivi e articoli su una vasta gamma di argomenti di matematica, dalla scuola elementare all’università.