Benvenuti nel primo volume di esercizi sulla ricerca di massimi e minimi vincolati per funzioni in più variabili. L’articolo consiste in una raccolta di 10 esercizi sulla ricerca dei punti di massimo e minimo di una funzione su un insieme compatto  . Viene studiata la presenza di eventuali punti di estremo sia nell’interno di
. Viene studiata la presenza di eventuali punti di estremo sia nell’interno di  , grazie al teorema di Fermat e alle tecniche classiche come lo studio della matrice hessiana, sia sul bordo
, grazie al teorema di Fermat e alle tecniche classiche come lo studio della matrice hessiana, sia sul bordo  , grazie a tecniche di parametrizzazione o utilizzando il metodo dei moltiplicatori di Lagrange.
, grazie a tecniche di parametrizzazione o utilizzando il metodo dei moltiplicatori di Lagrange.
Gli esercizi presentano soluzioni complete, quasi sempre più di una soluzione, per offrire al lettore una panoramica ampia di tecniche risolutive così da permettere di confrontarle e affinare le sue capacità di problem solving.
La raccolta è quindi particolarmente indicata per gli appassionati e per gli studenti dei corsi di Analisi Matematica 2, in vista della preparazione dell’esame.
Oltre a Massimi e minimi vincolati – Esercizi – Volume 2, segnaliamo il seguente materiale su argomenti correlati:
- Esercizi su punti stazionari con determinante hessiano nullo;
- Guida ai Massimi e Minimi: Tecniche e Teoria nelle Funzioni Multivariabili;
- Esercizi su massimi e minimi liberi per funzioni in più variabili;
- Esercizi sui limiti in due variabili.
Buona lettura!
Autori e revisori
Leggi...
Revisori: Matteo Talluri, Davide La Manna, Jacopo Garofali, Daniele Bjørn Malesani, Silvia Lombardi, Valerio Brunetti.
Introduzione
Leggi...
 . Essa è composta da esercizi di varia difficoltà ed è rivolta a studenti di Ingegneria, Fisica e Matematica che desiderano affrontare l’esame di Analisi 2. Tutti gli esercizi presentano una soluzione convenzionale, mentre alcuni ne hanno altre più ad hoc. L’obiettivo è quello di suggerire allo studente strade alternative per risolvere l’esercizio più velocemente. Gli strumenti utilizzati sono il Teorema di Fermat per quanto riguarda la parte interna dell’insieme, mentre per la sua frontiera adotteremo il metodo della parametrizzazione, qualora possibile, o il metodo dei moltiplicatori di Lagrange, quando il vincolo è espresso come luogo di zeri.
. Essa è composta da esercizi di varia difficoltà ed è rivolta a studenti di Ingegneria, Fisica e Matematica che desiderano affrontare l’esame di Analisi 2. Tutti gli esercizi presentano una soluzione convenzionale, mentre alcuni ne hanno altre più ad hoc. L’obiettivo è quello di suggerire allo studente strade alternative per risolvere l’esercizio più velocemente. Gli strumenti utilizzati sono il Teorema di Fermat per quanto riguarda la parte interna dell’insieme, mentre per la sua frontiera adotteremo il metodo della parametrizzazione, qualora possibile, o il metodo dei moltiplicatori di Lagrange, quando il vincolo è espresso come luogo di zeri.Richiami di teoria
Leggi...
 un insieme compatto e sia
un insieme compatto e sia  una funzione continua. Allora
una funzione continua. Allora  ammette massimo e minimo su
ammette massimo e minimo su  .
.
 è compatto se e solo se è chiuso e limitato.
è compatto se e solo se è chiuso e limitato.
 un insieme aperto,
un insieme aperto,  e
e  tale che è differenziabile in
tale che è differenziabile in  . Allora, se è un punto di massimo o minimo relativo per su
. Allora, se è un punto di massimo o minimo relativo per su  , vale
, vale  .
.
 una funzione differenziabile su tutto , insieme aperto. Allora, tutti i punti di massimo o minimo relativo di su sono, in particolare, punti critici.
una funzione differenziabile su tutto , insieme aperto. Allora, tutti i punti di massimo o minimo relativo di su sono, in particolare, punti critici.
 due funzioni di classe
due funzioni di classe  , sia
, sia  . Supponiamo che
. Supponiamo che  sia un punto di massimo o minimo di su
sia un punto di massimo o minimo di su  e che
e che  , allora
, allora  tale che
tale che

 . Se la funzione
. Se la funzione  è strettamente crescente, i punti di massimo di corrispondono a punti di massimo per
è strettamente crescente, i punti di massimo di corrispondono a punti di massimo per  , ugualmente per i punti di minimo. Viceversa, se è strettamente decrescente, i punti di massimo di corrispondono a punti di minimo per e viceversa.
, ugualmente per i punti di minimo. Viceversa, se è strettamente decrescente, i punti di massimo di corrispondono a punti di minimo per e viceversa.![\[\quad\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-27e49cccda278470ae7436bace68813e_l3.svg "Rendered by QuickLaTeX.com")
Dimostrazione. Dimostriamolo attraverso la definizione: un punto  si dice punto di massimo per su se e solo se
si dice punto di massimo per su se e solo se  ,
,  (analogamente per punto di minimo). Ma allora, essendo , con strettamente crescente si ha
(analogamente per punto di minimo). Ma allora, essendo , con strettamente crescente si ha

Viceversa, se è strettamente decrescente

Esercizi
 . Data la funzione
. Data la funzione  definita da
definita da
![\[f(x,y):=x^2+3y^2+\dfrac{1}{2}x,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-0c414df580321c450049c79040318943_l3.svg "Rendered by QuickLaTeX.com")
determinare, se esistono, il massimo e il minimo di sull’insieme
![\[E:=\{(x,y)\in\mathbb{R}^2\mid x^2+4y^2\leq4\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a0cf30ead064d77e72f60525744c34db_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento 1.
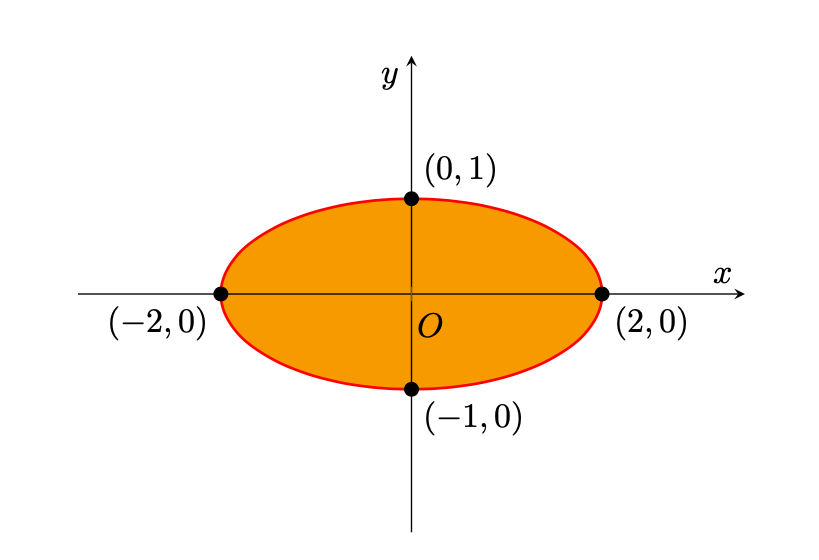
Figura 1: L’insieme  .
.
Osserviamo immediatamente che , essendo un polinomio, è una funzione continua su , mentre l’insieme è compatto, poiché rappresenta un’ellisse piena. Più precisamente, esso è limitato in quanto ogni suo punto è contenuto nella palla di centro l’origine e raggio  , mentre è chiuso poiché controimmagine dell’intervallo chiuso
, mentre è chiuso poiché controimmagine dell’intervallo chiuso ![[0,4]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ec6e1ee86b61db1728db81c895fe5b40_l3.svg "Rendered by QuickLaTeX.com") tramite la funzione continua
tramite la funzione continua  . Pertanto, il teorema di Weierstrass assicura l’esistenza del massimo e del minimo di su , come richiesto.
. Pertanto, il teorema di Weierstrass assicura l’esistenza del massimo e del minimo di su , come richiesto.
Per indagare tali punti, di cui abbiamo mostrato l’esistenza, ricorriamo al Teorema di Fermat, per il quale condizione necessaria per essere un punto di massimo o minimo è quella di essere punto critico. È importante sottolineare che tale comportamento si applica a funzioni differenziabili su un insieme aperto. Il più grande aperto contenuto in , al quale possiamo applicare il teorema di Fermat è  1. Dovremo studiare diversamente
1. Dovremo studiare diversamente  2, in modo da esaminare l’intero insieme
2, in modo da esaminare l’intero insieme  3.
3.
Indaghiamo gli eventuali punti critici di in , ovvero i punti  tali che
tali che  . Calcoliamo il gradiente di svolgendo le derivate parziali:
. Calcoliamo il gradiente di svolgendo le derivate parziali:
![\[\begin{cases} \dfrac{\partial f}{\partial x}(x,y)=2x+\dfrac{1}{2}\\\\ \dfrac{\partial f}{\partial y}(x,y)=6y. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a2fdefa56888387d10d87573bf8ac137_l3.svg "Rendered by QuickLaTeX.com")
Dunque
![\[\nabla f(x,y)=(0,0)\quad \Leftrightarrow \quad \displaystyle\left\{\begin{array}{l} 2x+\dfrac{1}{2}=0\\\\ 6y=0 \end{array} \right.\quad \Leftrightarrow \quad\displaystyle\left\{\begin{array}{l} x=-\dfrac{1}{4}\\ y=0. \end{array} \right.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-6046b5d7dda854e1c04641e3ac77d54e_l3.svg "Rendered by QuickLaTeX.com")
Ciò significa che l’unico punto critico di è  , il quale appartiene a , poiché soddisfa la disequazione stretta
, il quale appartiene a , poiché soddisfa la disequazione stretta  .
.
Consideriamo ora la frontiera di . Presentiamo due modi per trovare il massimo e minimo di su : attraverso il metodo dei moltiplicatori di Lagrange o con la parametrizzazione della frontiera. In questo caso conviene il secondo metodo, essendo un’ellisse con i fuochi sull’asse  e semiassi
e semiassi  ,
,  . Una parametrizzazione di è la seguente:
. Una parametrizzazione di è la seguente:
![\[\begin{aligned} \alpha:[0,2\pi] & \longrightarrow \mathbb{R}^2\\ t & \longmapsto (2\cos(t),\sin(t)). \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-12e6abde1f7d10cd084d1d795c348583_l3.svg "Rendered by QuickLaTeX.com")
A questo punto sarà sufficiente studiare i punti di massimo e minimo assoluti della funzione, dipendente da una variabile, ![f\circ\alpha:[0,2\pi]\rightarrow\mathbb{R}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2ed6e32823bf48321c6eecb5b13363ee_l3.svg "Rendered by QuickLaTeX.com") . Osserviamo che
. Osserviamo che  è composizione di funzioni continue, quindi anch’essa continua su
è composizione di funzioni continue, quindi anch’essa continua su  e l’intervallo
e l’intervallo ![[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ffb229e5260cf9d342ad47e70e13b657_l3.svg "Rendered by QuickLaTeX.com") è compatto, pertanto il teorema di Weierstrass assicura nuovamente l’esistenza di massimo e minimo di su . Essi si possono trovare in corrispondenza dei punti critici di , ovvero i punti
è compatto, pertanto il teorema di Weierstrass assicura nuovamente l’esistenza di massimo e minimo di su . Essi si possono trovare in corrispondenza dei punti critici di , ovvero i punti  tali che
tali che  oppure nei punti di frontiera della curva
oppure nei punti di frontiera della curva  , che solitamente si trovano negli estremi del dominio della curva. In questo caso, essendo una curva chiusa, la sua frontiera è vuota e per questo possiamo evitare di studiare gli estremi del dominio.
, che solitamente si trovano negli estremi del dominio della curva. In questo caso, essendo una curva chiusa, la sua frontiera è vuota e per questo possiamo evitare di studiare gli estremi del dominio.
Esplicitamente,

dunque, cerchiamo le soluzioni dell’equazione , con ![t\in[0,2\pi]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-60d5b1d3bd41f1cf9690f69a4982316a_l3.svg "Rendered by QuickLaTeX.com") :
:

che ha come soluzioni

da cui

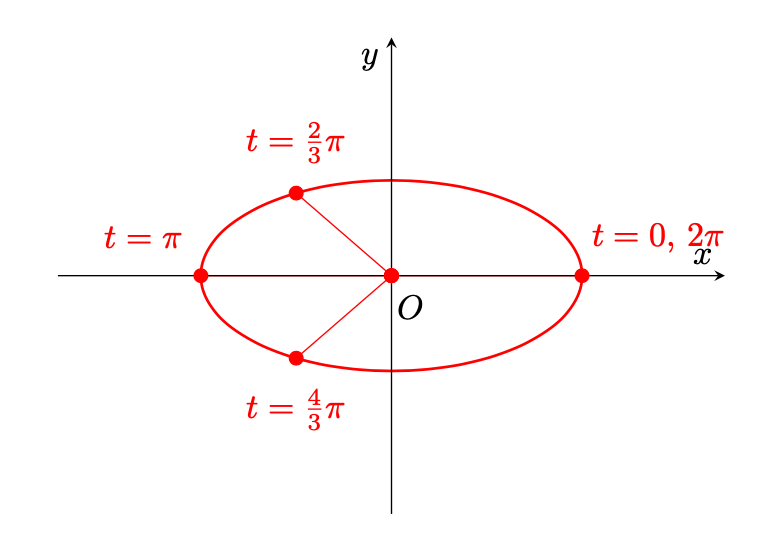
Figura 2: I punti critici di .
a cui corrispondono i punti su :

Abbiamo trovato tutti i punti di che concorrono nel diventare massimo o minimo di su : calcoliamo il valore di in tali punti, così da selezionarne il massimo e il minimo.
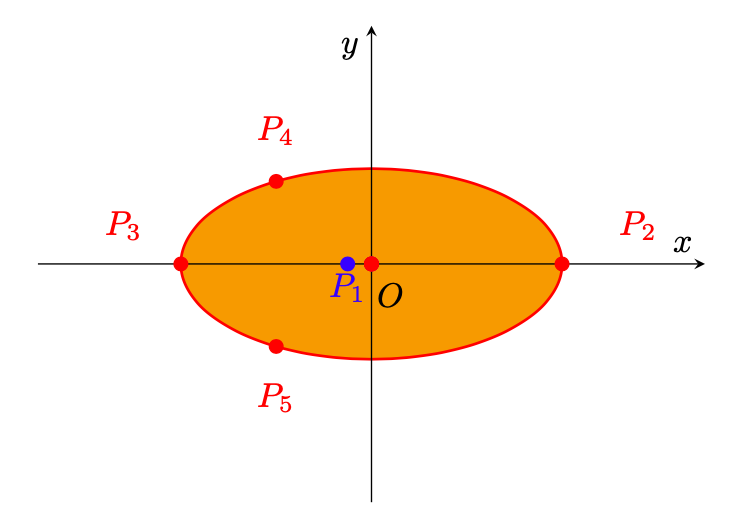
Figura 3: i punti candidati a punti di massimo o minimo di su .

Ecco dunque la soluzione al problema di massimo e minimo vincolati:
su vale 5, assunto in corrispondenza del punto  , mentre il minimo è
, mentre il minimo è  , assunto in .
, assunto in .
 s’intende unione disgiunta.
s’intende unione disgiunta. Svolgimento 2.
![\[\begin{aligned} \psi:[0,2\pi]\times[0,2] & \longrightarrow\mathbb{R}^2 \\ (\theta,\rho) & \longmapsto\left(\rho\cos{\theta},\dfrac{1}{2}\rho\sin\theta\right). \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-588d7cdfdbb9a33cd13d7b3b3554b92b_l3.svg "Rendered by QuickLaTeX.com")
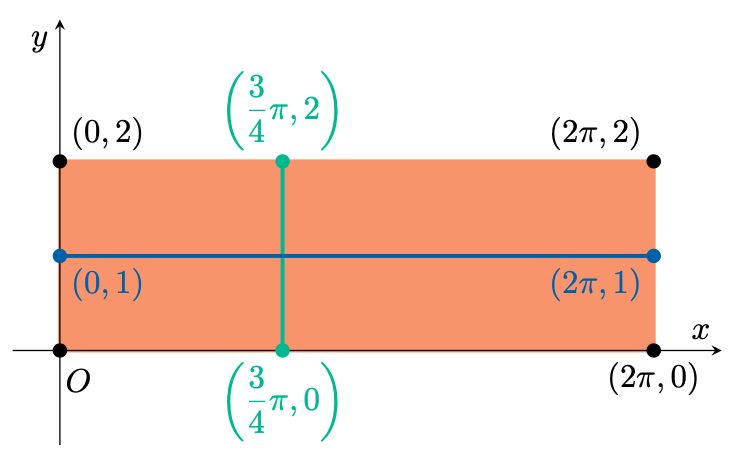
Figura 4: Dominio della parametrizzazione con linee coordinate. |
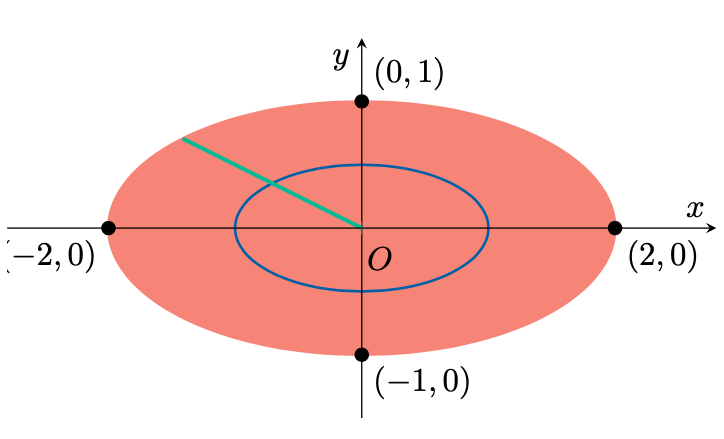
Figura 5: Immagine della parametrizzazione e delle linee coordinate. |