Benvenuti nella nostra guida alle coniche affini reali. In questo articolo esploreremo le proprietà algebriche e geometriche delle cosiddette sezioni coniche, così denominate poiché si ottengono dall’intersezione tra un piano e una superficie conica.
Vedremo che le coniche sono naturalmente associate a un’equazione di secondo grado, a sua volta discendente da una cosiddetta forma quadratica sullo spazio vettoriale  , e vedremo come dalle proprietà algebriche di tale forma sia possibile classificare le relative coniche in varie tipologie dalle diverse caratteristiche.
, e vedremo come dalle proprietà algebriche di tale forma sia possibile classificare le relative coniche in varie tipologie dalle diverse caratteristiche.
Oltre alla raccolta di Esercizi sulla classificazione affine di coniche reali, consigliamo i seguenti articoli correlati:
- Le coniche come intersezioni tra un piano e un cono;
- Esercizi sulle forme bilineari;
- Problemi risolti su endomorfismi e diagonalizzazione;
- Esercizi di geometria affine del piano.
Buona lettura!
Autori e revisori
Leggi...
Revisori: Jacopo Garofali, Sara Sottile.
Notazioni
Leggi...
 |
trasposta della matrice  ; ; |
 |
inversa della matrice ; |
 |
rango della matrice ; |
 |
determinante della matrice ; |
 |
polinomio caratteristico della matrice (espresso nella variabile  ); ); |
 |
nucleo della matrice ; |
 |
matrice identità di ordine  ; ; |
 |
somma diretta dei sottospazi  e e  . . |
Introduzione
Leggi...
In questa dispensa ci occupiamo solamente di coniche nel piano affine, ovvero non pensiamo  dotato di un prodotto scalare (e quindi, di conseguenza, nemmeno di una nozione di distanza o di ampiezza di angoli). Le coniche nel piano euclideo (in cui possiamo misurare lunghezze e angoli) possono essere studiate sviluppando una teoria in parte sovrapponibile a quella che qui presentiamo, ma che differisce per alcuni punti sostanziali.
dotato di un prodotto scalare (e quindi, di conseguenza, nemmeno di una nozione di distanza o di ampiezza di angoli). Le coniche nel piano euclideo (in cui possiamo misurare lunghezze e angoli) possono essere studiate sviluppando una teoria in parte sovrapponibile a quella che qui presentiamo, ma che differisce per alcuni punti sostanziali.
Uno di questi è il fatto che ogni conica possiede una forma canonica affine ed una euclidea (o metrica), ed esse non necessariamente coincidono. Ad esempio le circonferenze di raggio  ,
,  ,
,  ,
,  \dots formano una famiglia di infinite coniche, aventi forma canonica euclidea
\dots formano una famiglia di infinite coniche, aventi forma canonica euclidea  al variare di
al variare di  . Nessuna coppia di queste circonferenze è formata da oggetti isometrici, cioè equivalenti in senso euclideo, in quanto i raggi sono a due a due distinti. Nonostante questo, nel piano affine (in cui non si possono misurare le lunghezze dei segmenti) ogni circonferenza ha forma canonica
. Nessuna coppia di queste circonferenze è formata da oggetti isometrici, cioè equivalenti in senso euclideo, in quanto i raggi sono a due a due distinti. Nonostante questo, nel piano affine (in cui non si possono misurare le lunghezze dei segmenti) ogni circonferenza ha forma canonica  .
.
Conoscere la forma canonica di una conica risulta molto utile per studiarne le proprietà geometriche. Per questo motivo, in questa dispensa discutiamo alcuni algoritmi e criteri che permettono di stabilire la forma canonica di una conica a partire dalla sua equazione.
Nello specifico, la dispensa è strutturata come segue.
![\[\quad\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-27e49cccda278470ae7436bace68813e_l3.svg "Rendered by QuickLaTeX.com")
- Nella sezione 1 definiamo il concetto di conica ed analizziamo alcuni esempi di oggetti geometrici noti, ma scritti in questa nuova forma.
- Nella sezione 2 descriviamo cosa significa che due coniche sono “lo stesso oggetto”. In questo modo possiamo formalizzare il problema di classificare tutti i tipi di coniche.
- Nella sezione 3 utilizziamo il linguaggio dell’algebra lineare per riscrivere in modo compatto e maneggevole l’equazione di una conica. Questa notazione risulta utile nello studio della geometria delle coniche e per la loro classificazione.
- Nella sezione 4 elenchiamo le nove forme canoniche delle coniche affini reali ed analizziamo ciascuna di esse.
- Nella sezione 5 esponiamo il metodo degli invarianti, uno strumento rapido e semplice per classificare una qualunque conica a partire dalla sua equazione. Lo svantaggio principale di questo metodo è che fornisce solamente la forma canonica della conica, senza calcolare una affinità esplicita che riduca la conica stessa in tale forma.
- Nella sezione 6 esponiamo il metodo di completamento dei quadrati, che sopperisce al problema del metodo degli invarianti. Sfortunatamente, esso si può applicare in maniera agevole solamente in alcuni casi, e non ha un’estensione meccanica allo studio di una conica generale.
- Nella sezione 7 esponiamo l’algoritmo di riduzione in forma canonica, che attraverso calcoli un po’ più complessi permette di trovare la forma canonica e l’affinità che riduce la conica in tale forma nel caso generale.
- L’appendice A elenca brevemente alcuni risultati di algebra lineare necessari per il resto della dispensa, in particolar modo relativi alla definizione di segnatura di una matrice simmetrica a coefficienti reali e ai metodi per calcolarla.
Sezioni coniche
Leggi...
, dotato di un riferimento affine fissato. Sappiamo già che i punti del piano possono essere caratterizzati come coppie di numeri reali della forma  . Le rette del piano sono invece caratterizzate come l’insieme dei punti – visti come coppie ordinate — che annullano un polinomio di primo grado, della forma
. Le rette del piano sono invece caratterizzate come l’insieme dei punti – visti come coppie ordinate — che annullano un polinomio di primo grado, della forma
![\[f(x)=ax+by+c\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7e3d2b066d23366bfe54aeb45edcb9b8_l3.svg "Rendered by QuickLaTeX.com")
con almeno uno fra i coefficienti  e
e  diverso da zero.
diverso da zero.
Ovviamente non tutti gli oggetti considerati dalla geometria classica sono punti o rette. Un esempio classico è quello della circonferenza, che sappiamo essere descritta da un’equazione della forma
![\[x^2+y^2=R^2\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-c2cbaf49209206605972ca3fa97c3ad8_l3.svg "Rendered by QuickLaTeX.com")
dove  è il raggio della circonferenza stessa. Questa equazione è di secondo grado, e non ricade nei casi già noti e studiati.
è il raggio della circonferenza stessa. Questa equazione è di secondo grado, e non ricade nei casi già noti e studiati.
È quindi ragionevole studiare l’insieme delle soluzioni di un’equazione polinomiale di secondo grado, e capire quali proprietà caratterizzano gli oggetti geometrici così definiti. Innanzitutto li identificheremo con un nome proprio.
 un polinomio di secondo grado in due variabili, della forma
un polinomio di secondo grado in due variabili, della forma
(1) 
dove almeno uno dei coefficienti  è non nullo. Si chiama sezione conica, o più semplicemente conica, l’insieme
è non nullo. Si chiama sezione conica, o più semplicemente conica, l’insieme  dei punti del piano che soddisfano l’equazione
dei punti del piano che soddisfano l’equazione  , in simboli
, in simboli
![\[\mathscr{C}=\left\{(x, y)\in \mathbb {R}^2\colon p(x, y)=0\right\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-92ba3035d6a3ba7e759ac1db695416c9_l3.svg "Rendered by QuickLaTeX.com")
La scrittura viene anche detta equazione della conica.
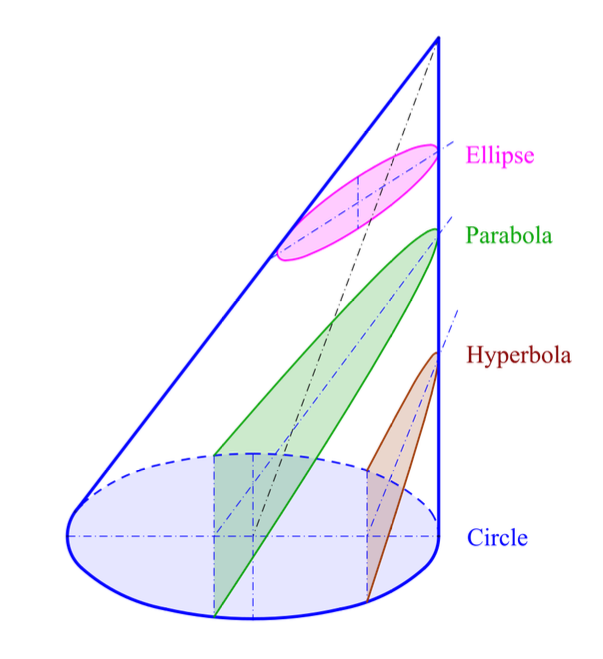
Osservazione 1.2. Il nome sezione conica è dovuto agli antichi greci. Infatti è possibile dimostrare che le coniche sono tutte e sole le possibili intersezioni fra un doppio cono infinito (potenzialmente degenere in un cilindro) ed un piano.
Osservazione 1.3. La ragione della scrittura del polinomio nella forma (1), con coefficienti  ,
,  e
e  , invece che semplicemente ,
, invece che semplicemente ,  ed
ed  , è che essa semplificherà alcune notazioni nel seguito della dispensa. Per ora notiamo semplicemente che essa non inficia la generalità della definizione: ogni polinomio di secondo grado in due variabili può essere scritto nella forma (1) per opportuni valori di
, è che essa semplificherà alcune notazioni nel seguito della dispensa. Per ora notiamo semplicemente che essa non inficia la generalità della definizione: ogni polinomio di secondo grado in due variabili può essere scritto nella forma (1) per opportuni valori di  .
.
Passiamo ad analizzare alcuni esempi.
Esempio 1.4 (insieme vuoto).
Consideriamo la conica di equazione  , o equivalentemente
, o equivalentemente  . Dato che i quadrati di numeri reali sono sempre positivi o nulli, non esistono punti
. Dato che i quadrati di numeri reali sono sempre positivi o nulli, non esistono punti  che verificano tale equazione. Ne segue che è l’insieme vuoto:
che verificano tale equazione. Ne segue che è l’insieme vuoto:  .
.
Esempio 1.5 (punti). Consideriamo la conica di equazione  . Dato che il quadrato di un numero reale non nullo è strettamente positivo, l’unica coppia che verifica tale equazione soddisfa
. Dato che il quadrato di un numero reale non nullo è strettamente positivo, l’unica coppia che verifica tale equazione soddisfa  . Di conseguenza, l’unico punto contenuto in è l’origine:
. Di conseguenza, l’unico punto contenuto in è l’origine:
![\[\mathscr{C}=\{(0, 0)\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a7faa32f2f88025ab33c007f781cb11e_l3.svg "Rendered by QuickLaTeX.com")
Scelto un qualunque punto  non è ora difficile costruire in modo simile una conica che contenga solamente il punto
non è ora difficile costruire in modo simile una conica che contenga solamente il punto  stesso. Ad esempio, possiamo considerare la conica
stesso. Ad esempio, possiamo considerare la conica  di equazione
di equazione
![\[(x-s)^2+(y-t)^2=0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e7fcd58373e1bbf86753d9051c16cf39_l3.svg "Rendered by QuickLaTeX.com")
Ripetendo lo stesso ragionamento del caso precedente, l’unica coppia che verifica tale equazione deve soddisfare  , e quindi
, e quindi  . Ne segue che
. Ne segue che
![\[\mathscr{D}=\{(s, t)\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e8943a638e5bd34ca986ec02930f7367_l3.svg "Rendered by QuickLaTeX.com")
Esempio 1.6 (rette). Consideriamo la conica di equazione  . Chiaramente, un punto soddisfa questa equazione se e solo se
. Chiaramente, un punto soddisfa questa equazione se e solo se  : ne segue che
: ne segue che
![\[\mathscr{C}=\left\{(x, y)\in \mathbb{R}^2\colon x=0\right\}=\{(0, y)\colon y\in \mathbb {R}\},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f34ddfe68280b49cb832da68120cd75e_l3.svg "Rendered by QuickLaTeX.com")
o in altre parole è una retta (ovvero l’asse  ).
).
Possiamo sfruttare questa tecnica per scrivere ogni retta come conica. Supponiamo infatti di volere scrivere in questo modo la retta  di equazione
di equazione  con
con  e almeno uno fra i coefficienti
e almeno uno fra i coefficienti  e non nullo. Allora possiamo considerare la conica di equazione
e non nullo. Allora possiamo considerare la conica di equazione
![\[(mx+ny+p)^2=0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ef2bd30eb35ed5135e22cffe25e1b887_l3.svg "Rendered by QuickLaTeX.com")
I punti di sono tutti e soli quelli che verificano , e quindi tutti e soli quelli della retta  . Di conseguenza
. Di conseguenza  .
.
Questi esempi mostrano che esiste una varietà di coniche distinte le une dalle altre: circonferenza, insieme vuoto, punti e rette hano proprietà geometriche diverse. Ciò non accadeva nello studio di equazioni di primo grado: le rette del piano affine hanno tutte le stesse proprietà geometriche, o in altre parole possono essere considerate tutte “copie dello stesso oggetto”.
È quindi piuttosto naturale, a questo punto, cercare di elencare in modo esaustivo tutte le tipologie di coniche che si possono presentare, e capire come data una conica generica la si può classificare in una di queste tipologie. Per rispondere alla domanda dobbiamo però prima definire in maniera precisa cosa intendiamo per tipologie di coniche e per classificazione.
Equivalenza affine
Questa parte è riservata agli abbonati
per continuare a leggere, attiva un abbonamento.
• Mensile: 7,99€ / mese • Trimestrale: 19,99€ / 3 mesi • Annuale: 79,99€ / anno
Attiva abbonamentoGià abbonato? Accedi