Benvenuti nel secondo volume di esercizi sui moti vari. In questo articolo proponiamo 17 esercizi sulla descrizione e le proprietà dei moti che i corpi possono assumere nello spazio. I problemi sono di difficoltà varia, illustrati e ciascuno è corredato di soluzione completa, così da consentire al lettore di confrontare la sua soluzione con quella da noi proposta, per un apprendimento più efficace.
Oltre al primo volume di Esercizi sui moti vari – 1, consigliamo le seguenti raccolte di esercizi su materiale affine:
- Leggi della dinamica – Esercizi;
- Lavoro ed energia – Esercizi;
- Sistemi di punti materiali – Esercizi;
- Esercizi sulla gravitazione.
Buona lettura!
Sommario
Leggi...
Autori e revisori
Leggi...
Esercizi
![\[\quad\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-27e49cccda278470ae7436bace68813e_l3.svg "Rendered by QuickLaTeX.com")
 . Un punto materiale è vincolato a muoversi lungo una retta. Scelto un sistema di riferimento fisso
. Un punto materiale è vincolato a muoversi lungo una retta. Scelto un sistema di riferimento fisso  tale per cui l’asse delle
tale per cui l’asse delle  sia coincidente con la retta lungo la quale il punto materiale è vincolato a muoversi, la posizione del punto materiale è data dalla seguente legge oraria
sia coincidente con la retta lungo la quale il punto materiale è vincolato a muoversi, la posizione del punto materiale è data dalla seguente legge oraria

dove  è espresso in secondi e in metri. Calcolare l’istante
è espresso in secondi e in metri. Calcolare l’istante  in cui la velocità e l’accelerazione hanno lo stesso valore numerico.
in cui la velocità e l’accelerazione hanno lo stesso valore numerico.
Richiami teorici.
- Sia
 ,
,  con
con  , la sua derivata è
, la sua derivata è  . Inoltre, ricordiamo che la derivata di una costante è nulla.
. Inoltre, ricordiamo che la derivata di una costante è nulla. - Data un’equazione completa di secondo grado

con
 e
e  , la formula risolutiva è
, la formula risolutiva è
dove

Il
 si chiama discriminante. Se
si chiama discriminante. Se  allora l’equazione ammette due soluzioni reali e distinte; se
allora l’equazione ammette due soluzioni reali e distinte; se  allora l’equazione ha due soluzioni reali e coincidenti; altrimenti, se
allora l’equazione ha due soluzioni reali e coincidenti; altrimenti, se  , l’equazione non ammette soluzioni reali, cioè ci sono due soluzioni complesse e coniugate.
, l’equazione non ammette soluzioni reali, cioè ci sono due soluzioni complesse e coniugate. In fisica,
 rappresentano degli istanti di tempo che in generale devono essere non negativi, per cui se uno dei due tempi è negativo, va scartato.
rappresentano degli istanti di tempo che in generale devono essere non negativi, per cui se uno dei due tempi è negativo, va scartato. - La derivata del vettore posizione è la velocità e si denota con

mentre la derivata seconda del vettore posizione (o la derivata prima della velocità) è l’accelerazione del corpo e si denota con

Svolgimento.
 ,
,  e
e  per rappresentare rispettivamente la la posizione, la velocità e l’accelerazione del punto materiale.
Derivando ambo i membri della legge oraria rispetto al tempo, si ricava che l’equazione della velocità è
per rappresentare rispettivamente la la posizione, la velocità e l’accelerazione del punto materiale.
Derivando ambo i membri della legge oraria rispetto al tempo, si ricava che l’equazione della velocità è

mentre l’equazione dell’accelerazione

Uguagliando le due precedenti equazioni, si ottiene


da cui
Utilizziamo come notazione , e per rappresentare rispettivamente la la posizione, la velocità e l’accelerazione del punto materiale.
Derivando ambo i membri della legge oraria rispetto al tempo, si ricava che l’equazione della velocità è
mentre l’equazione dell’accelerazione
Uguagliando le due precedenti equazioni, si ottiene

da cui
![\[\boxcolorato{fisica}{t \simeq \text{2,414 s}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f74a0a52e800bbbeabb7f5d1d950eea2_l3.svg "Rendered by QuickLaTeX.com")
. Un punto materiale è vincolato a muoversi lungo una retta di moto vario. Si scelga un sistema di riferimento fisso con l’asse delle coincidente con la retta lungo la quale il punto materiale è vincolato a muoversi. Sia la legge oraria del corpo in . Nel sistema di riferimento il punto materiale ha un’accelerazione  La posizione soddisfa le seguenti condizioni
La posizione soddisfa le seguenti condizioni  e
e  . Si richiede di calcolare dove si trova il punto materiale all’istante
. Si richiede di calcolare dove si trova il punto materiale all’istante  .
.
Richiami teorici.
,  e
e  rispettivamente la legge oraria, la velocità e l’accelerazione del punto materiale nel sistema di riferimento .
rispettivamente la legge oraria, la velocità e l’accelerazione del punto materiale nel sistema di riferimento .
Per ottenere l’equazione per la velocità è necessario integrare ambo i membri rispetto al tempo dell’equazione per l’accelerazione, e a sua volta l’equazione per la posizione è ottenuta integrando ambo i membri rispetto al tempo l’equazione della velocità. Una volta integrato ambo i membri rispetto al tempo dell’equazione considerata (accelerazione o velocità), imponendo le condizioni iniziali del problema è possibile determinare le costanti di integrazione, da cui le leggi cercate. La relazione che lega posizione, velocità e accelerazione può essere riassunta nel seguente schema rappresentato in figura.

Inoltre, ricordiamo l’integrale di una funzione polinomiale. Sia 
 con
con  , il suo integrale indefinito è
, il suo integrale indefinito è

dove  è la costante d’integrazione.
è la costante d’integrazione.
Svolgimento.

Integrando ambo i membri rispetto al tempo la precedente equazione, si ottiene

dove è una costante di integrazione da determinare.
Integrando rispetto al tempo ambo i membri la precedente equazione, si trova

dove  è una costante di integrazione da determinare.
è una costante di integrazione da determinare.
Per poter determinare il valore numerico delle costanti e imponiamo e . Sfruttando la precedente equazione e imponendo le condizioni e , si ottiene il seguente sistema
![\begin{equation*} \begin{cases} 0=k\\[10pt] 5=9-\dfrac{27}{2}+3c+k, \end{cases} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2cfdf0c166c90174de8b1bd50d9c7489_l3.svg "Rendered by QuickLaTeX.com")
da cui
![\begin{equation*} \begin{cases} k=0\\[10pt] c=\dfrac{19}{6}. \end{cases} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-36630aedd5c8d2a9488e33cd14d0330c_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo le costanti trovate nel precedente sistema nell’equazione (18), si ottiene

Sostituendo nella precedente equazione , si ha
![\[\boxcolorato{fisica}{x(12)=398\, \text{m}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-de601cd4ed0dbc86cf33ecb1a7bd619e_l3.svg "Rendered by QuickLaTeX.com")
. Un punto materiale è vincolato a muoversi su di una retta. Si scelga un sistema di riferimento fisso con l’asse delle coincidente con la retta lungo la quale è vincolato a muoversi il punto materiale. Sia la legge oraria del punto materiale in . L’accelerazione del punto materiale è  . Le condizioni del problema sono e
. Le condizioni del problema sono e  . Calcolare la posizione del punto materiale all’istante
. Calcolare la posizione del punto materiale all’istante  .
.
Svolgimento.

Integrando ambo i membri rispetto al tempo la precedente equazione, si ottiene

dove è una costante di integrazione da determinare.
Integrando ambo i membri rispetto al tempo la precedente equazione, si ha

dove è una costante d’integrazione da determinare.
Per poter determinare il valore numerico delle costanti e imponiamo le condizioni e  . Dalle due precedenti equazioni, imponendo e , si ottiene
. Dalle due precedenti equazioni, imponendo e , si ottiene
![\begin{equation*} \begin{cases} 0=k\\[10pt] 7=9+3+c, \end{cases} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-825c526e2836135c383ef556459836b4_l3.svg "Rendered by QuickLaTeX.com")
da cui

Sostituendo le costanti determinate nel precedente sistema nell’equazione (24), si trova

Sostituendo  nella precedente equazione, otteniamo
nella precedente equazione, otteniamo
![\[\boxcolorato{fisica}{x(8)=333\, \text{m}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b76c469d34dc4ab0efe0c930ec673573_l3.svg "Rendered by QuickLaTeX.com")
Scarica gli esercizi svolti
Ottieni due volumi scaricabili sui moti vari in cinematica, contenenti rispettivamente 6 e 17 esercizi, completi di soluzioni dettagliate. Il primo volume è di 16 pagine, mentre il secondo è di 34.
 . Un punto materiale è vincolato a muoversi su di un piano orizzontale. Si scelga un sistema di riferimento fisso
. Un punto materiale è vincolato a muoversi su di un piano orizzontale. Si scelga un sistema di riferimento fisso  tale per cui il piano
tale per cui il piano  sia coincidente con il piano orizzontale sul quale è vincolato a muoversi il punto materiale. Il punto materiale lungo l’asse delle ha legge oraria
sia coincidente con il piano orizzontale sul quale è vincolato a muoversi il punto materiale. Il punto materiale lungo l’asse delle ha legge oraria  , mentre lungo l’asse delle
, mentre lungo l’asse delle  ha legge oraria
ha legge oraria  . Calcolare l’istante di tempo in cui il vettore velocità e il vettore accelerazione risultino perpendicolari.
. Calcolare l’istante di tempo in cui il vettore velocità e il vettore accelerazione risultino perpendicolari.
Richiami teorici.

e

dove  ,
,  ,
,  ,
,  ,
,  ,
, 
 ,
,  e
e  sono rispettivamente la componente del vettore
sono rispettivamente la componente del vettore  lungo l’asse delle , la componente del vettore lungo l’asse delle , la componente del vettore lungo l’asse delle
lungo l’asse delle , la componente del vettore lungo l’asse delle , la componente del vettore lungo l’asse delle  , la componente del vettore
, la componente del vettore  lungo l’asse delle , la componente del vettore lungo l’asse delle , la componente del vettore lungo l’asse delle , il versore dell’asse delle , il versore dell’asse delle e il versore dell’asse delle ; il loro prodotto scalare è
lungo l’asse delle , la componente del vettore lungo l’asse delle , la componente del vettore lungo l’asse delle , il versore dell’asse delle , il versore dell’asse delle e il versore dell’asse delle ; il loro prodotto scalare è

Svolgimento.

da cui
![\begin{equation*} \begin{cases} \dot{x}(t)=3t^2-3 \\[10pt] \dot{y}(t)=2t , \end{cases} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b0474b641953fc750858df23b577dc18_l3.svg "Rendered by QuickLaTeX.com")
conseguentemente
![\begin{equation*} \begin{cases} \ddot{x}(t)=6t \\[10pt] \ddot{y}(t)=2 . \end{cases} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-eeddb2ead8a0ea06eb8b1306c7d5973b_l3.svg "Rendered by QuickLaTeX.com")
Siano  e
e  rispettivamente la velocità e l’accelerazione del punto materiale nel sistema di riferimento ; sfruttando i due precedenti sistemi, si ha
rispettivamente la velocità e l’accelerazione del punto materiale nel sistema di riferimento ; sfruttando i due precedenti sistemi, si ha

e

Due vettori si dicono perpendicolari se il loro prodotto scalare è nullo. Pertanto, sfruttando le due precedenti equazioni il prodotto scalare  diventa
diventa

ovvero

La precedente equazione ha come risultati
 ,
,  . Scartando le soluzioni negative troviamo
. Scartando le soluzioni negative troviamo
![\[\boxcolorato{fisica}{t=0 \quad \vee \quad t \sim\text{0,8 s}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-3247bce28fc45a6e2e66f34573a1df79_l3.svg "Rendered by QuickLaTeX.com")
. All’istante  , un punto materiale è vincolato a muoversi lungo una circonferenza. Si rappresenti con
, un punto materiale è vincolato a muoversi lungo una circonferenza. Si rappresenti con  l’arco di circonferenza misurato in centimetri descritto dal punto materiale e con il tempo trascorso misurato in secondi. La posizione del corpo è descritto dalla legge oraria
l’arco di circonferenza misurato in centimetri descritto dal punto materiale e con il tempo trascorso misurato in secondi. La posizione del corpo è descritto dalla legge oraria  . Si determini l’accelerazione tangenziale del punto all’instante di tempo
. Si determini l’accelerazione tangenziale del punto all’instante di tempo 
 .
.
Svolgimento.

Pertanto sostituendo nella precedente equazione otteniamo

Sostituendo  nella precedente equazione si ricava
nella precedente equazione si ricava
![\[\boxcolorato{fisica}{a_t=\text{77 cm}\cdot \text{s}^{-2}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8b3a4d607940f77726398e1a621f3c12_l3.svg "Rendered by QuickLaTeX.com")
. Un camion percorre 
 verso nord, poi
verso nord, poi  verso est e infine 6 verso sud. Si determini l’angolo
verso est e infine 6 verso sud. Si determini l’angolo  che lo spostamento complessivo forma con la direzione est.
che lo spostamento complessivo forma con la direzione est.
Svolgimento.
 ,
,  ,
,  e
e  rispettivamente il primo spostamento verso nord, il secondo verso est, il finale verso sud e lo spostamento complessivo.
rispettivamente il primo spostamento verso nord, il secondo verso est, il finale verso sud e lo spostamento complessivo.
Scegliamo un sistema di riferimento fisso  tale per cui l’origine
tale per cui l’origine  coincide con la posizione iniziale del camion, l’asse individua la direzione nord-sud ed è orientato verso nord. Siano , i versori rispettivamente dell’asse delle e dell’asse delle . Analogamente l’asse delle individua la direzione est-ovest ed è orientato verso est. In virtù del sistema di riferimento adottato i vettori
coincide con la posizione iniziale del camion, l’asse individua la direzione nord-sud ed è orientato verso nord. Siano , i versori rispettivamente dell’asse delle e dell’asse delle . Analogamente l’asse delle individua la direzione est-ovest ed è orientato verso est. In virtù del sistema di riferimento adottato i vettori  e sono orientati come in figura 1.
e sono orientati come in figura 1.

Figura 1: schema del problema.
Come si evince dallo schema del problema, i vettori , e

formano un triangolo rettangolo dove il primo vettore è l’ipotenusa, mentre gli altri due ne sono i cateti. Siccome e hanno verso opposto, ossia  e
e  , si ha che
, si ha che

da ciò segue che il modulo di  vale
vale  .
La relazione trigonometrica che lega il modulo del vettore e il modulo dello spostamento complessivo
.
La relazione trigonometrica che lega il modulo del vettore e il modulo dello spostamento complessivo  è
è

dove è l’angolo rappresentato in figura 1 cioè l’angolo che forma con l’asse delle .
Invertendo quest’ultima equazione si ottiene
![\[\boxcolorato{fisica}{\alpha=\arctan{\left(\frac{|\vec{s}_{4}|}{|\vec{s}_{2}|}\right)} \simeq 71 \mbox{\textdegree}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d186f3687826dfdc62eb38ffc5c24a48_l3.svg "Rendered by QuickLaTeX.com")
Metodo algebrico. Come si evince dallo schema del problema si ha
![\begin{equation*} \begin{cases} \vec{s}_1=\text{35 km}\,\hat{y}\\[10pt] \vec{s}_2=\text{10 km}\,\hat{x}\\[10pt] \vec{s}_3=-\text{6 km}\,\hat{y}. \end{cases} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8128dde6529ec935c92050a38405b334_l3.svg "Rendered by QuickLaTeX.com")
Sommando opportunatamente membro a membro le precedenti equazioni del sistema (43) si ottiene quanto segue

da cui  e . La prosecuzione della risoluzione di quest’esercizio con questo metodo è equivalente al precedente metodo.
e . La prosecuzione della risoluzione di quest’esercizio con questo metodo è equivalente al precedente metodo.
. In un sistema di riferimento fisso , consideriamo un punto che si muove seguendo la legge oraria  metri, valida per
metri, valida per  . Si richiede di calcolare:
. Si richiede di calcolare:
- la velocità del punto nel generico istante
 ;
; - la posizione del punto per
 e
e  ;
; - il tempo in cui il punto attraversa l’origine del sistema di riferimento.

Figura 2: rappresentazione schematica del problema.
Svolgimento.
orientato verso destra, come illustrato nella figura 2.
Indichiamo con  la posizione del punto al tempo e con
la posizione del punto al tempo e con  la sua posizione al tempo
la sua posizione al tempo  , come mostrato nella figura. Dato che i valori esatti di e non sono ancora noti, essi sono stati posizionati a destra dell’origine per convenzione, assumendo senza perdita di generalità che
, come mostrato nella figura. Dato che i valori esatti di e non sono ancora noti, essi sono stati posizionati a destra dell’origine per convenzione, assumendo senza perdita di generalità che  e
e  .
.
- La velocità del punto materiale si calcola derivando la legge oraria rispetto al tempo:
![\[\boxcolorato{fisica}{\displaystyle v(t) = \frac{d}{dt}x(t) = -4\ \text{m}\cdot \text{s}^{-1}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-0414aaac0a81e174f8f9c378cea32a6d_l3.svg "Rendered by QuickLaTeX.com")
Dato che la velocità è costante nel tempo (non dipende da
), il punto materiale si muove in un moto rettilineo uniforme. Inoltre, poiché la velocità calcolata è negativa, il punto si sta spostando nella direzione negativa dell’asse delle . Di conseguenza, possiamo aspettarci che  .
. - Per determinare i valori numerici delle posizioni e , precedentemente definite, è necessario sostituire i valori e nella legge oraria. Questo ci porta ai seguenti risultati:

Da queste, otteniamo che:
![\[\boxcolorato{fisica}{\displaystyle x_0 = 5\ \text{m}\, , \quad x_1 = -3\ \text{m}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-6f28c0d8440724a7a89eec081161cd38_l3.svg "Rendered by QuickLaTeX.com")
Concludiamo quindi che, nella figura, il punto
si deve situare a sinistra dell’origine , in accordo con il fatto che la velocità è negativa. - Il tempo in cui il punto passa per l’origine è il valore
 tale per cui:
tale per cui:  . Quindi:
. Quindi:

che ci fa trovare
![\[\boxcolorato{fisica}{\displaystyle t^* = 5/4\ \text{s} = \text{1,25}\ \text{s}. }\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-61082d29828fe51048de8e13dac18561_l3.svg "Rendered by QuickLaTeX.com")
Potevamo aspettarci a priori un valore di tempo compreso tra
 e
e  , una volta considerato che l’origine è situata tra il punto da cui ha origine il moto a , ed il punto , raggiunto a
, una volta considerato che l’origine è situata tra il punto da cui ha origine il moto a , ed il punto , raggiunto a  .
.
Osservazione.

dove  rappresenta la posizione iniziale del punto e
rappresenta la posizione iniziale del punto e  la sua velocità, che è costante. Questa espressione descrive una retta in cui il coefficiente angolare corrisponde alla velocità del punto e il termine noto alla sua posizione iniziale al tempo . Di conseguenza, nel nostro caso specifico, deduciamo immediatamente che
la sua velocità, che è costante. Questa espressione descrive una retta in cui il coefficiente angolare corrisponde alla velocità del punto e il termine noto alla sua posizione iniziale al tempo . Di conseguenza, nel nostro caso specifico, deduciamo immediatamente che  e
e  .
.
. Si consideri su un piano orizzontale una guida liscia di forma parabolica, rappresentata dall’equazione  , con e espresse in metri. Un punto P si muove con velocità costante,
, con e espresse in metri. Un punto P si muove con velocità costante,  , lungo la guida. Determinare le componenti dell’accelerazione quando il punto P passa per il vertice della parabola e per il punto di ascissa
, lungo la guida. Determinare le componenti dell’accelerazione quando il punto P passa per il vertice della parabola e per il punto di ascissa  .
.

Proposizione.
 derivabile in tutto il suo dominio naturale tale che
derivabile in tutto il suo dominio naturale tale che  e sia
e sia  la sua inversa. Definiamo
la sua inversa. Definiamo  e siano
e siano  .
.


dove in  abbiamo applicato la regola della catena.
abbiamo applicato la regola della catena.
Consideriamo ora  , dunque
, dunque
![\[\tilde{a}(x)=a(t(x))=\dfrac{dv}{dt}\left(t(x)\right)\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-defb9f9b7b2fdc6d5fcaa888326aca9a_l3.svg "Rendered by QuickLaTeX.com")
e con (49) possiamo riscrivere

Osserviamo che (50) è ben definita perchè per ipotesi  .
.
Per la regola della derivata della funzione inversa si ha che

ed applicando la (51) alla (50), allora (50) diventa
![\[\tilde{a}(x)= \tilde{v}(x)\,\frac{d\tilde{v}}{dx}\left(x\right).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2705df867fc059db6318ad26808debbd_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento.

dove  e
e  sono rispettivamente la componente nella direzione e della velocità.
sono rispettivamente la componente nella direzione e della velocità.

dove è l’angolo che forma la componente  della velocità tangente alla parabola con l’asse orizzontale.
della velocità tangente alla parabola con l’asse orizzontale.
Dalla (53) si ottiene
![\[\tilde{v}_y=10x\tilde{v}_x.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-3c10d3d5b824ea271d3121016d631a5d_l3.svg "Rendered by QuickLaTeX.com")
Sostituiamo in (52) ottenendo
![\[\tilde{v}_x(x)=\dfrac{v_0}{\sqrt{1+100x^2}},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-adc2267703325710e55dd741f8f1e82c_l3.svg "Rendered by QuickLaTeX.com")
da cui
![\[\tilde{v}_y(x)=\dfrac{10xv_0}{\sqrt{1+100x^2}}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b950127526be787708e4863829564b6e_l3.svg "Rendered by QuickLaTeX.com")
Applicando (48) si ottiene
![\[\begin{cases} a_x(x)=\tilde{v}_x(x)\dfrac{d\tilde{v}(x)_x}{dx}=\left( \dfrac{v_0}{\sqrt{1+100x^2}}\right) \left( \dfrac{-100v_0x}{(\sqrt{1+100x^2})^3}\right)=\dfrac{-100xv_0^2}{(1+100x^2)^2};\\ a_y(x)=\tilde{v}_x(x)\dfrac{d\tilde{v}(y)}{dx}=\left( \dfrac{v_0}{\sqrt{1+100x^2}}\right)\dfrac{10v_0}{\sqrt{(1+100x^2)^3}}=\dfrac{10\left(v_0\right)^2}{(1+100x^2)^2}.\\ \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-3252581165735aecdd29b4ac9703dee1_l3.svg "Rendered by QuickLaTeX.com")
Dalla quale si trova che
![\[\boxcolorato{fisica}{\begin{cases} a_x(0)=0;\\ a_y(0)=10v_0;\\ a_x(x^*)=\dfrac{-100x^*v_0^2}{(1+100(x^*)^2)^2};\\\ a_y(x^*)=\dfrac{10v_0}{(1+100(x^*)^2)^2}.\\ \end{cases}}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-bd4d4c82ea24f7e0dff9b172dd3468fe_l3.svg "Rendered by QuickLaTeX.com")
 . Su un piano orizzontale sono poste due guide lisce, perpendicolari tra loro, lungo le quali posso scorrere gli estremi di un’asta
. Su un piano orizzontale sono poste due guide lisce, perpendicolari tra loro, lungo le quali posso scorrere gli estremi di un’asta  , lunga
, lunga  . Inizialmente l’asta è disposta lungo l’asse . L’estremo
. Inizialmente l’asta è disposta lungo l’asse . L’estremo  viene mantenuto in moto con velocità costante
viene mantenuto in moto con velocità costante  . Determinare il modulo della velocità e dell’accelerazione dell’estremo
. Determinare il modulo della velocità e dell’accelerazione dell’estremo  quando raggiunge la posizione
quando raggiunge la posizione  .
.

Svolgimento.
possiamo scrivere la posizione di e , gli estremi dell’asta sono vincolati a muoversi sulle due guide lisce

Deriviamo rispetto al tempo (54)
![\[\begin{cases} \dot{x}_B=-\ell \dot{ \theta} \sin \theta\\ \dot{y}_B=0\\ \dot{x}_A=0\\ \dot{y}_A=\ell \dot{ \theta} \cos \theta \\ \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-73222db7a8133a9f652a23f28e71fb4b_l3.svg "Rendered by QuickLaTeX.com")
Sapendo che l’estremo è mantenuto a velocità costante si ha che

Dalla (55) si trova che
![\[\dot{ \theta}=-\dfrac{v_B}{\ell\sin \theta}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4f82f204b7801ec32e5d60a047e9439a_l3.svg "Rendered by QuickLaTeX.com")
Posto  , si trova che
, si trova che
![\[\tan \theta =\dfrac{\sqrt{\ell^2-X_B^2}}{X_B}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-97364a30d7e2755a40d831e4f7e52837_l3.svg "Rendered by QuickLaTeX.com")
Sostituiamo  in
in  , ottenendo
, ottenendo
![\[\boxcolorato{fisica}{\dot{ y}_A=\left(\ell\cos \theta\right)\left(-\dfrac{v_B}{\ell\sin \theta} \right)=-\dfrac{v_B}{\tan \theta}= -\dfrac{v_BX_B}{\sqrt{\ell^2-X_B^2}}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4d7b188fce84bfa833b816dc80555bd7_l3.svg "Rendered by QuickLaTeX.com")
Deriviamo nuovamente rispetto al tempo la (54)
![\[\begin{cases} \ddot{x}_B=-\ell(\ddot{ \theta} \sin \theta+\dot{ \theta}^2\cos \theta )=0\\ \ddot{y}_B=0\\ \ddot{x}_A=0\\ \ddot{y}_A=\ell(\ddot{ \theta} \cos \theta-\dot{ \theta}^2 \sin \theta )\\ \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9c669b36a9d6fc67c32c9171f81c5a7e_l3.svg "Rendered by QuickLaTeX.com")
Dal sistema ricaviamo
![\[\ddot{ \theta}=-\dfrac{\dot{ \theta}^2}{\tan \theta}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-dd748a6110001edf367192846ad294cb_l3.svg "Rendered by QuickLaTeX.com")
Sostituiamo e  in
in  si ottiene
si ottiene
![\[\begin{aligned} &\text{ \boxcolorato{fisica}{\parbox{0.5cm}{$ \ddot{y}_A$}}}}=-\ell\left(\dfrac{\dot{ \theta}^2 \cos\theta}{\tan \theta}+\dot{ \theta}^2 \sin \theta\right)=\\ &=-\ell\dot{ \theta}^2\left(\dfrac{\cos\theta}{\tan \theta}+\sin \theta\right)=\\ &=-\dfrac{\ell v_B^2}{\ell^2(\sin \theta)^2}\left(\dfrac{\cos^2\theta}{\sin \theta}+\sin \theta\right)=\\ &=-\dfrac{\ell v_B^2}{\ell^2(\sin \theta)^3}=\\ &=\text{\boxcolorato{fisica}{-\left(\dfrac{v_B^2}{\ell}\right)\left(\dfrac{\ell^3}{(\sqrt{\ell^2-X_B^2})^3} \right)}}. \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-473c0d426a9feac7e772fddd43457481_l3.svg "Rendered by QuickLaTeX.com")
Si conclude che i valori cercati sono
![\[\boxcolorato{fisica}{\begin{cases} \dot{ y}_A=\left(\ell\cos \theta\right)\left(-\dfrac{v_B}{\ell\sin \theta} \right)=-\dfrac{v_B}{\tan \theta}= -\dfrac{v_BX_B}{\sqrt{\ell^2-X_B^2}};\\\\ \ddot{y}_A=-\left(\dfrac{v_B^2}{\ell}\right)\left(\dfrac{\ell^3}{(\sqrt{\ell^2-X_B^2})^3} \right). \end{cases}}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-65be425795a1a2071371b025c4469579_l3.svg "Rendered by QuickLaTeX.com")
 . Un punto materiale si muove a velocità costante partendo dall’origine di un sistema di riferimento fisso , su di una spirale di Archimede, avente equazione polare
. Un punto materiale si muove a velocità costante partendo dall’origine di un sistema di riferimento fisso , su di una spirale di Archimede, avente equazione polare  . Un secondo punto materiale si muove lungo una circonferenza di raggio
. Un secondo punto materiale si muove lungo una circonferenza di raggio  centrata nell’origine, con velocità costante , partendo dal punto
centrata nell’origine, con velocità costante , partendo dal punto  . Si determini la velocità non nulla affinché i due punti si urtino.
. Si determini la velocità non nulla affinché i due punti si urtino.

Figura 3: rappresentazione di un punto materiale A che si muove lungo una spirale di Archimede e di un punto materiale B che si muove lungo una circonferenza di raggio . L’esercizio richiede di determinare la velocità di affinché i due punti si scontrino.
Svolgimento.

risulta chiaro che l’unica possibilità per far avvenire l’urto è quando  , ovvero nel punto
, ovvero nel punto  , quindi il punto materiale deve fare un giro completo lungo la circonferenza. Per questo motivo dobbiamo calcolare il tempo che il punto materiale impiega lungo la spirale di Archimede per arrivare nel punto dall’origine del sistema di riferimento in figura 3.
, quindi il punto materiale deve fare un giro completo lungo la circonferenza. Per questo motivo dobbiamo calcolare il tempo che il punto materiale impiega lungo la spirale di Archimede per arrivare nel punto dall’origine del sistema di riferimento in figura 3.
La velocità del punto materiale , in coordinate polari, è

dove  e
e  sono rispettivamente la componente radiale e la componente trasversa della velocità.
sono rispettivamente la componente radiale e la componente trasversa della velocità.
Sapendo che  , si ha:
, si ha:

da cui



che è un’equazione differenziale del primo ordine a variabili separabili, da cui

Integriamo il membro sinistro di (61) tra e  dove è l’istante in cui avviene l’urto tra i due punti materiali ed il membro destro di (61) tra e
dove è l’istante in cui avviene l’urto tra i due punti materiali ed il membro destro di (61) tra e  , otteniamo:
, otteniamo:

Ricordando l’integrale notevole:

abbiamo

da cui

Il punto materiale si muove a velocità costante , dunque per compiere un giro nel tempo deve valere

cioè

. Una persona (indicata con  in figura 4 (sinistra)) porta a passeggio il suo cane (indicato con
in figura 4 (sinistra)) porta a passeggio il suo cane (indicato con  sempre in figura 4 (sinistra)). Si considerino il cane e la persona come due punti materiali. Sia un sistema di riferimento fisso, rappresentato in figura 4; inoltre, siano e i versori rispettivamente dell’asse delle e delle . Il punto si muove a velocità
sempre in figura 4 (sinistra)). Si considerino il cane e la persona come due punti materiali. Sia un sistema di riferimento fisso, rappresentato in figura 4; inoltre, siano e i versori rispettivamente dell’asse delle e delle . Il punto si muove a velocità  , dove è costante. All’istante
, dove è costante. All’istante  si ha
si ha  . Il punto è legato a da un guinzaglio di lunghezza , che supponiamo inestensibile; all’istante
. Il punto è legato a da un guinzaglio di lunghezza , che supponiamo inestensibile; all’istante  , è fermo e si trova lungo l’asse nella posizione
, è fermo e si trova lungo l’asse nella posizione  . Negli istanti successivi, si muoverà puntando costantemente verso , in modo da mantenere il guinzaglio sempre teso. Si determini il modulo
. Negli istanti successivi, si muoverà puntando costantemente verso , in modo da mantenere il guinzaglio sempre teso. Si determini il modulo  della velocità del cane in funzione di e della coordinata in cui il cane si trova durante il moto.
della velocità del cane in funzione di e della coordinata in cui il cane si trova durante il moto.
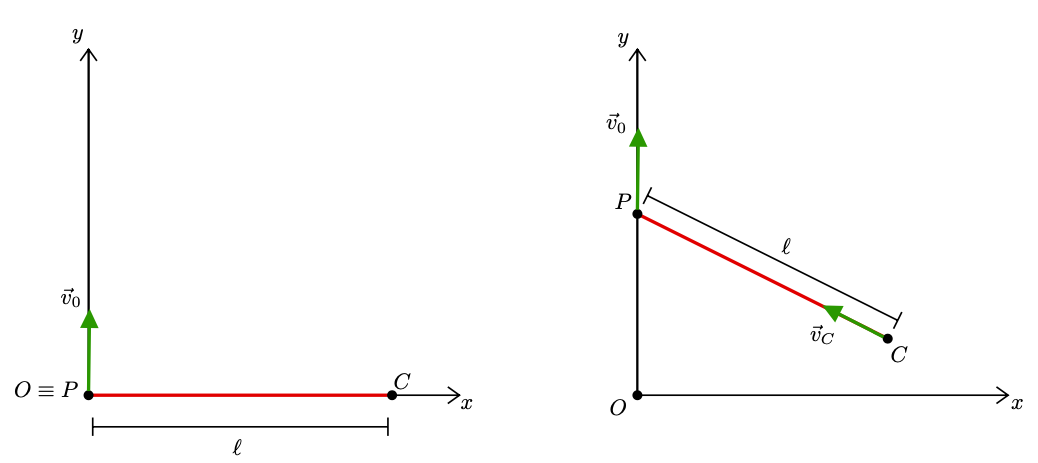
Figura 4: schema del sistema per  e per
e per  generico.
generico.
Svolgimento.
 e
e  rispettivamente l’ascissa e l’ordinata di , da cui
rispettivamente l’ascissa e l’ordinata di , da cui  e
e  rappresentano rispettivamente la velocità di nelle direzioni dell’asse delle e delle . Pertanto La velocità del punto è
rappresentano rispettivamente la velocità di nelle direzioni dell’asse delle e delle . Pertanto La velocità del punto è

Inoltre, sia  l’ordinata del punto e
l’ordinata del punto e  l’angolo compreso tra il guinzaglio e il segmento parallelo all’asse con un estremo nel punto , come mostra la figura 5.
l’angolo compreso tra il guinzaglio e il segmento parallelo all’asse con un estremo nel punto , come mostra la figura 5.

Figura 5: schema del problema al tempo  generico.
generico.
Il testo richiede che le componenti e siano espresse in funzione delle variabili e . Per fare ciò, notiamo che per ipotesi il guinzaglio (supposto inestensibile) deve essere sempre teso: questo significa che  , ossia che la lunghezza del guinzaglio non varia nel tempo. Osservando la figura 5, dalla geometria del problema, deduciamo che
, ossia che la lunghezza del guinzaglio non varia nel tempo. Osservando la figura 5, dalla geometria del problema, deduciamo che

da cui, derivando rispetto al tempo ambo i membri della precedente relazione, otteniamo

da cui

o anche, ricordando che  e
e  , si ottiene
, si ottiene

Dalla figura 5 si deduce che


Facendo il rapporto membro a membro delle equazioni (74) e (74)
e (74) , si ottiene
, si ottiene

Inoltre, notiamo che

Pertanto, si ha


Sostituendo (calcolata nell’equazione (78)) nell’equazione (72), si ottiene
![\begin{equation*} \begin{split} &x_C\dot{x}_C+\dfrac{\dot{x}_C\left(\ell^2-x_C^2\right)}{x_C}+v_0\sqrt{\ell^2-x_C^2}=0\quad \Leftrightarrow\\[10pt] &\Leftrightarrow \quad x_C^2\dot{x}_C+\dot{x}_C\left(\ell^2-x_C^2\right)+v_0x_C\sqrt{\ell^2-x_C^2}=0\quad \Leftrightarrow\\[10pt] &\Leftrightarrow\quad \dot{x}_C(x_C^2+\ell^2-x_C^2)=-v_0x_C\sqrt{\ell^2-x_C^2}\quad \Leftrightarrow\\[10pt] & \Leftrightarrow\quad\dot{x}_C=-\dfrac{v_0x_C\sqrt{\ell^2-x_C^2}}{\ell^2}. \end{split} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7cf6ee249e87368be98394e4b6605fc6_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo (calcolata nell’equazione (78)) nell’equazione (72), si trova

Sfruttando le equazioni (79) e (80) possiamo calcolare . Abbiamo dunque

ossia

da cui
![\[\boxcolorato{fisica}{v_C=\dfrac{v_0}{\ell}\sqrt{\ell^2-x_C^2}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d4af7a5ac5c4c059953c6b61a6bd9faa_l3.svg "Rendered by QuickLaTeX.com")
. Nel meccanismo rappresentato nella figura 6, i punti , e rappresentano 3 cerniere per le aste  e
e  (supposte rigide e di massa trascurabile) di uguale lunghezza . Siano un sistema di riferimento fisso e l’angolo che l’asta forma con l’asse delle . A partire dall’istante , l’asta forma l’angolo
(supposte rigide e di massa trascurabile) di uguale lunghezza . Siano un sistema di riferimento fisso e l’angolo che l’asta forma con l’asse delle . A partire dall’istante , l’asta forma l’angolo  e la cerniera viene avvicinata a muovendola lungo l’asse , con velocità costante di modulo . Supponendo fisso, si calcoli in funzione del tempo
e la cerniera viene avvicinata a muovendola lungo l’asse , con velocità costante di modulo . Supponendo fisso, si calcoli in funzione del tempo
- l’angolo .
- Le componenti cartesiane della velocità, nel sistema di riferimento fisso , del punto .
- Le componenti cartesiane dell’accelerazione, nel sistema di riferimento fisso , del punto .
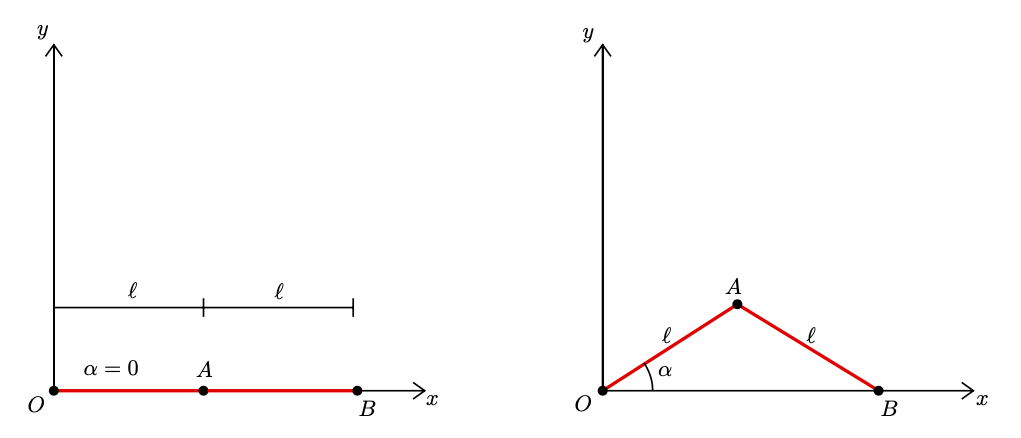
Figura 6: schema del sistema al tempo  (a sinistra) e per un tempo generico (a destra).
(a sinistra) e per un tempo generico (a destra).
Svolgimento punto 1.
 è isoscele, in ogni istante del moto; segue che gli angoli alla base sono tra loro congruenti e dunque la configurazione del sistema al generico istante
è isoscele, in ogni istante del moto; segue che gli angoli alla base sono tra loro congruenti e dunque la configurazione del sistema al generico istante  può essere rappresentata come in figura 7.
può essere rappresentata come in figura 7.

Figura 7: schema sistema per generico.
Dalla figura 7, è immediato dedurre che il vettore posizione del punto , vincolato a muoversi lungo l’asse , sia

dove e rappresentano rispettivamente i versori dell’asse delle e delle .
Inoltre, sappiamo che il suo moto lungo l’asse delle avviene a velocità costante con modulo , dunque la cerniera si muove di moto rettilineo uniforme. Quindi

dove  è la posizione iniziale della cerniera (si veda la figura 7 (a sinistra)). Confrontando l’equazione (83) con l’equazione (84), otteniamo
è la posizione iniziale della cerniera (si veda la figura 7 (a sinistra)). Confrontando l’equazione (83) con l’equazione (84), otteniamo

Osserviamo che l’equazione (85) per essere ben definita deve valere

o anche

oppure

da cui

Si conclude che
![\[\boxcolorato{fisica}{\alpha=\arccos\left(1-\dfrac{vt}{2\ell}\right), \quad0\leq t\leq\dfrac{4\ell}{v}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4288b4ebd20c8ef43f567730accce481_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento punto 2.
. Facendo riferimento alla figura 7, osserviamo che il suo vettore posizione è descritto dalle coordinate

Grazie alla soluzione del punto  , sappiamo inoltre che
, sappiamo inoltre che

dunque sfruttando questo risultato e ricordando l’identità fondamentale della goniometria possiamo ricavare l’espressione della posizione di in funzione del tempo:

La velocità di è

Abbiamo dunque

e

In definitiva, avremo dunque
![\[\boxcolorato{fisica}{\vec{v}_A=-\dfrac{v}{2}\,\hat{x}+\sqrt{v\ell}\left(1-\dfrac{vt}{2\ell}\right)\left(t-\dfrac{vt^2}{4\ell}\right)^{-\frac{1}{2}}\hat{y}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-89bfcff2aa15ae110b97e7437be8a495_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento punto 3.
lungo la direzione dell’asse delle  è data dalla derivata rispetto al tempo della velocità
è data dalla derivata rispetto al tempo della velocità  ; dal momento che
; dal momento che  è costante nel tempo, avremo
è costante nel tempo, avremo
![\[\boxcolorato{fisica}{\ddot{x}_A=0.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-0f942845d1098745b5ef877bb33aa253_l3.svg "Rendered by QuickLaTeX.com")
. Un punto percorre una spirale logaritmica con l’accelerazione che punta costantemente verso il centro di un sistema di riferimento fisso . Ricordando che la distanza  , in un generico istante , del punto da è data da
, in un generico istante , del punto da è data da
dove  e
e  sono delle costanti,
sono delle costanti,  è l’angolo che forma
è l’angolo che forma  con l’asse delle , si dimostri che il modulo dell’accelerazione è inversamente proporzionale al cubo della distanza .
con l’asse delle , si dimostri che il modulo dell’accelerazione è inversamente proporzionale al cubo della distanza .


Svolgimento.

dove  e
e  sono rispettivamente i versori nella direzione radiale e trasversa. Sappiamo che l’accelerazione punta sempre nella direzione radiale, pertanto deve valere
sono rispettivamente i versori nella direzione radiale e trasversa. Sappiamo che l’accelerazione punta sempre nella direzione radiale, pertanto deve valere

da cui


Deriviamo ambo i membri della (96), rispetto al tempo, ottenendo

dove nei precedenti passaggi abbiamo sfruttato la (100) e la (96), inoltre abbiamo denotato il prodotto  con
con  . Deriviamo ambo i membri della (101), rispetto al tempo, ottenendo
. Deriviamo ambo i membri della (101), rispetto al tempo, ottenendo

dove nei precedenti passaggi abbiamo usato (101) e abbiamo denotato  con
con  .
.
Dunque, tenendo conto di quanto ottenuto, ovvero di (100) e (102), e ricordando che la componente trasversa deve essere nulla per le ipotesi del problema, la (97) diventa

dove abbiamo denotato  . Da (103), si ha
. Da (103), si ha

che è esattamente quello che volevamo dimostrare.
 . Un punto materiale si muove su un piano orizzontale di moto incognito e sappiamo che la componente dell’accelerazione diretta lungo il semiasse positivo delle è costante. Esprimendo il moto del punto materiale in coordinate polari secondo il sistema di riferimento fisso illustrato nella figura seguente.
. Un punto materiale si muove su un piano orizzontale di moto incognito e sappiamo che la componente dell’accelerazione diretta lungo il semiasse positivo delle è costante. Esprimendo il moto del punto materiale in coordinate polari secondo il sistema di riferimento fisso illustrato nella figura seguente.

giungiamo alla relazione sottostante:
![\[\begin{aligned} &\sqrt{2}\left(\ddot{\rho}-\rho \, \left(\dot{\theta} \right)^2 \right) \cos \left( \theta + \dfrac{\pi}{4} \right)-\sqrt{2}\left( 2 \dot{\rho}\,\dot{\theta}+\rho \, \ddot{\theta}\right)\cos \left( \theta - \dfrac{\pi}{4}\right)+k(t)=0,\\[10pt] &\text{dove}\,\,k(t)=\left(\dfrac{d^2\rho}{dt^2}-\rho\left(\dfrac{d\theta}{dt}\right)^2\right)\sin \theta- \left(\dfrac{1}{\rho}\dfrac{d\left(\rho^2\dfrac{d\theta }{dt}\right)}{dt} \right)\cos \theta. \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4d3d7cf70fff3d279a6c5130e3b49c4c_l3.svg "Rendered by QuickLaTeX.com")
Determinare di che moto si muove il punto materiale rispetto a tale sistema di riferimento.
Nota: nell’esercizio utilizzeremo la seguente notazione  .
.
Svolgimento.
![\[\begin{cases} x=\rho \cos \theta\\ y=\rho \sin \theta \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f47f8f680a358b20d257e9a8d9503159_l3.svg "Rendered by QuickLaTeX.com")
e deriviamo rispetto al tempo ottenendo
![\[\begin{cases} \dot{x} =\dot{\rho}\, \cos \theta + \rho \left(- \sin \theta \right) \, \dot{\theta}\\ \dot{y}=\dot{\rho}\,\sin \theta + \rho \cos \theta \, \dot{\theta}. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-dcd920af353d38914268b62d6e32ccbd_l3.svg "Rendered by QuickLaTeX.com")
Deriviamo nuovamente rispetto al tempo

Ora, sottraiamo membro a membro, delle equazioni (105) (105), ottenendo
![\[\begin{aligned} &\ddot{x}-\ddot{y}=\\ &=\left(\ddot{\rho} \, \cos \theta + \dot{\rho}\,\left(-\sin \theta \right)\, \dot{\theta}+\dot{\rho}\,\left(- \sin \theta \right) \, \dot{\theta}+\rho \, \left( -\cos \theta\right)\, \left(\dot{\theta} \right)^2+\rho\, \left( -\sin \theta \right)\, \ddot{\theta}\right)+\\ &-\left(\ddot{\rho}\,\sin \theta +\dot{\rho} \, \cos \theta \, \dot{\theta}+\dot{\rho}\cos \theta \,\dot{\theta}+\rho \left(-\sin \theta\right) \left( \dot{\theta}\right)^2+\rho \cos \theta \, \ddot{\theta} \right)=\\ &=\ddot{\rho} \, \cos \theta - \dot{\rho}\,\sin \theta \, \dot{\theta}-\dot{\rho}\,\sin \theta \, \dot{\theta}-\rho \, \cos \theta \, \left(\dot{\theta} \right)^2-\rho\, \sin \theta \, \ddot{\theta}+\\ &-\ddot{\rho}\,\sin \theta -\dot{\rho} \, \cos \theta \, \dot{\theta}-\dot{\rho}\cos \theta \,\dot{\theta}+\rho \sin \theta \left( \dot{\theta}\right)^2-\rho \cos \theta \, \ddot{\theta}=\\ &=\ddot{\rho} \, \cos \theta -2 \dot{\rho}\,\sin \theta \, \dot{\theta}-\rho \, \cos \theta \, \left(\dot{\theta} \right)^2-\rho\, \sin \theta \, \ddot{\theta}-\ddot{\rho}\,\sin \theta -2\dot{\rho} \, \cos \theta \, \dot{\theta}+\rho \sin \theta \left( \dot{\theta}\right)^2-\rho \cos \theta \, \ddot{\theta}=\\ &=\ddot{\rho} \left(\cos \theta - \sin \theta \right)-2 \, \dot{\rho} \, \dot{\theta}\left(\cos \theta +\sin \theta \right)-\rho\left(\dot{\theta} \right)^2\left( \cos \theta -\sin \theta\right)-\rho \, \ddot{\theta}\left(\cos \theta +\sin \theta \right)=\\ &=\left(\ddot{\rho}-\rho \, \left(\dot{\theta} \right)^2 \right)\left(\cos \theta - \sin \theta \right)-\left( 2 \dot{\rho}\,\dot{\theta}+\rho \, \ddot{\theta}\right)\left( \cos \theta + \sin \theta \right)=\\ &=\sqrt{2}\left(\ddot{\rho}-\rho \, \left(\dot{\theta} \right)^2 \right) \cos \left( \theta + \dfrac{\pi}{4} \right)-\sqrt{2}\left( 2 \dot{\rho}\,\dot{\theta}+\rho \, \ddot{\theta}\right)\cos \left( \theta - \dfrac{\pi}{4}\right)\quad \Leftrightarrow\\ &\Leftrightarrow\quad \ddot{x}-\ddot{y}=\sqrt{2}\left(\ddot{\rho}-\rho \, \left(\dot{\theta} \right)^2 \right) \cos \left( \theta + \dfrac{\pi}{4} \right)-\sqrt{2}\left( 2 \dot{\rho}\,\dot{\theta}+\rho \, \ddot{\theta}\right)\cos \left( \theta - \dfrac{\pi}{4}\right). \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b776f2efae3c5adbe24970360d0e309a_l3.svg "Rendered by QuickLaTeX.com")
Evidenziamo il risultato appena ottenuto

Ricordiamo che l’accelerazione in coordinate polari si esprime come segue
![\[\vec{a}=\left(\dfrac{d^2\rho}{dt^2}-\rho\left(\dfrac{d\theta}{dt}\right)^2\right)\hat{r}+ \left(\dfrac{1}{\rho}\dfrac{d(\rho^2\frac{d\theta }{dt})}{dt} \right)\hat{\theta}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1497799ee520748c84130eaf8f73e634_l3.svg "Rendered by QuickLaTeX.com")
e consideriamo il seguente grafico.

Dal grafico si può osservare che
![\[\begin{cases} \hat{r}=\cos \theta\, \hat{x}+\sin \theta \,\hat{y}\\ \hat{\theta}=-\sin \theta \,\hat{x}+\cos \theta\, \hat{y}, \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-952c2a2ba470f451953463a0e2ae8568_l3.svg "Rendered by QuickLaTeX.com")
dove e sono rispettivamente i versori dell’asse delle e delle , da cui
![\[\begin{aligned} \vec{a}&=\left(\dfrac{d^2\rho}{dt^2}-\rho\left(\dfrac{d\theta}{dt}\right)^2\right)\left( \cos \theta \hat{x}+\sin \theta \hat{y}\right)+ \left(\dfrac{1}{\rho}\dfrac{d\left(\rho^2\dfrac{d\theta }{dt}\right)}{dt} \right)\left(-\sin \theta \hat{x}+\cos \theta \hat{y} \right)=\\[10pt] &=\hat{x}\left[\left(\dfrac{d^2\rho}{dt^2}-\rho\left(\dfrac{d\theta}{dt}\right)^2\right)\cos \theta- \left(\dfrac{1}{\rho}\dfrac{d\left(\rho^2\dfrac{d\theta }{dt}\right)}{dt} \right)\sin \theta \right]+ \\ &+\hat{y}\left[\left(\dfrac{d^2\rho}{dt^2}-\rho\left(\dfrac{d\theta}{dt}\right)^2\right)\sin \theta- \left(\dfrac{1}{\rho}\dfrac{d\left(\rho^2\dfrac{d\theta }{dt}\right)}{dt} \right)\cos \theta \right]. \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-bb71a75ae74995a40b68044b8bb4b4ee_l3.svg "Rendered by QuickLaTeX.com")
Quindi
![\[\begin{cases} \ddot{x}=\left(\dfrac{d^2\rho}{dt^2}-\rho\left(\dfrac{d\theta}{dt}\right)^2\right)\cos \theta- \left(\dfrac{1}{\rho}\dfrac{d\left(\rho^2\dfrac{d\theta }{dt}\right)}{dt} \right)\sin \theta \\[20pt] \ddot{y}=\left(\dfrac{d^2\rho}{dt^2}-\rho\left(\dfrac{d\theta}{dt}\right)^2\right)\sin \theta- \left(\dfrac{1}{\rho}\dfrac{d\left(\rho^2\dfrac{d\theta }{dt}\right)}{dt} \right)\cos \theta. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-995d35b6dc6513af40552123c36e07c4_l3.svg "Rendered by QuickLaTeX.com")
Chiamando
![\[k(t) = \left(\dfrac{d^2\rho}{dt^2}-\rho\left(\dfrac{d\theta}{dt}\right)^2\right)\sin \theta- \left(\dfrac{1}{\rho}\dfrac{d\left(\rho^2\dfrac{d\theta }{dt}\right)}{dt} \right)\cos \theta\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ac103ffe0fe3d5bf0f1ec28b74525faa_l3.svg "Rendered by QuickLaTeX.com")
e tornando alla (106) abbiamo
![\[\begin{aligned} \ddot{x}&=\sqrt{2}\left(\ddot{\rho}-\rho \, \left(\dot{\theta} \right)^2 \right) \cos \left( \theta + \dfrac{\pi}{4} \right)-\sqrt{2}\left( 2 \dot{\rho}\,\dot{\theta}+\rho \, \ddot{\theta}\right)\cos \left( \theta - \dfrac{\pi}{4}\right)+\ddot{y}=\\ &=\sqrt{2}\left(\ddot{\rho}-\rho \, \left(\dot{\theta} \right)^2 \right) \cos \left( \theta + \dfrac{\pi}{4} \right)-\sqrt{2}\left( 2 \dot{\rho}\,\dot{\theta}+\rho \, \ddot{\theta}\right)\cos \left( \theta - \dfrac{\pi}{4}\right)+k(t). \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2775b9ff04a5b623a74b613dcad7b972_l3.svg "Rendered by QuickLaTeX.com")
Osserviamo che ponendo  , si ottiene:
, si ottiene:
![\[\sqrt{2}\left(\ddot{\rho}-\rho \, \left(\dot{\theta} \right)^2 \right) \cos \left( \theta + \dfrac{\pi}{4} \right)-\sqrt{2}\left( 2 \dot{\rho}\,\dot{\theta}+\rho \, \ddot{\theta}\right)\cos \left( \theta - \dfrac{\pi}{4}\right)+k(t)=0,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8e51e6b1a0a4a8f7f00d257131426ef2_l3.svg "Rendered by QuickLaTeX.com")
che è la condizione richiesta.
Ne diamo ora un’interpretazione fisica.
Avendo posto questo ci fa concludere che  quindi lungo l’asse il punto materiale si muove di moto rettilineo uniforme. Mentre lungo l’asse per ipotesi sappiamo che il punto materiale si muove di moto rettilineo uniformemente accelerato. Concludiamo che il moto del punto materiale è dato dalla composizione di due moti: moto rettilineo uniforme lungo l’asse e uniformemente accelerato lungo l’asse .
quindi lungo l’asse il punto materiale si muove di moto rettilineo uniforme. Mentre lungo l’asse per ipotesi sappiamo che il punto materiale si muove di moto rettilineo uniformemente accelerato. Concludiamo che il moto del punto materiale è dato dalla composizione di due moti: moto rettilineo uniforme lungo l’asse e uniformemente accelerato lungo l’asse .
. Un punto materiale si trova su una piattaforma circolare di raggio e centro , che ruota con velocità angolare costante (modulo, direzione e verso)  in senso orario, come mostrato in figura 8. All’istante iniziale , il punto materiale si trova a una distanza
in senso orario, come mostrato in figura 8. All’istante iniziale , il punto materiale si trova a una distanza  dal centro della piattaforma e si muove verso di esso con una velocità relativa costante
dal centro della piattaforma e si muove verso di esso con una velocità relativa costante  rispetto alla piattaforma. Determinare, in direzione e modulo, la velocità assoluta del punto all’istante
rispetto alla piattaforma. Determinare, in direzione e modulo, la velocità assoluta del punto all’istante  nel sistema di riferimento fisso
nel sistema di riferimento fisso  rappresentato in figura 8.
rappresentato in figura 8.

Figura 8: rappresentazione del sistema fisico in esame.
Svolgimento.
 , solidale con la piattaforma che ruota, tale per cui il punto materiale si trovi sull’asse delle
, solidale con la piattaforma che ruota, tale per cui il punto materiale si trovi sull’asse delle  per ogni istante e
per ogni istante e  , come illustrato in figura 8. Siano, inoltre,
, come illustrato in figura 8. Siano, inoltre,  e rispettivamente la componente di lungo l’asse
e rispettivamente la componente di lungo l’asse  e la componente di
e la componente di  lungo . Osserviamo che siccome la piattaforma si muove in senso orario
lungo . Osserviamo che siccome la piattaforma si muove in senso orario  e che
e che  perché il punto materiale si muove nella direzione negativa delle .
perché il punto materiale si muove nella direzione negativa delle .

Figura 9: rappresentazione del sistema sistema di riferimento non inerziale  .
.
Osservando dal sistema di riferimento , il corpo si muove di moto rettilineo uniforme con velocità diretta lungo il semiasse negativo delle . Pertanto, essendo la posizione iniziale del corpo, la sua legge oraria è

Per determinare la posizione del corpo all’istante , sostituiamo nella precedente equazione e otteniamo

In base al teorema delle velocità relative, la velocità assoluta  del punto materiale nel sistema di riferimento fisso , è data dalla somma della velocità radiale e della velocità tangenziale
del punto materiale nel sistema di riferimento fisso , è data dalla somma della velocità radiale e della velocità tangenziale  del corpo, cioè
del corpo, cioè

dove  il vettore posizione del corpo nel sistema di riferimento
il vettore posizione del corpo nel sistema di riferimento  . In questo caso particolare, queste due velocità hanno direzioni ortogonali fra di loro, pertanto il modulo della loro somma è dato da
. In questo caso particolare, queste due velocità hanno direzioni ortogonali fra di loro, pertanto il modulo della loro somma è dato da

Essendo i vettori e ortogonali fra loro, si ha che  , da cui
, da cui
![\[\boxcolorato{fisica}{|\vec{v}_a | = \sqrt{ v_r^2 + (\omega r^\prime)^2}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-5036e15dee3e29380301ef05b2f92a84_l3.svg "Rendered by QuickLaTeX.com")
Per determinare la direzione della velocità assoluta basta considerare il triangolo di ipotenusa  e i cui cateti hanno lunghezza pari a
e i cui cateti hanno lunghezza pari a  e
e  , come illustrato in figura 10.
, come illustrato in figura 10.

Figura 10: rappresentazione della direzione della velocità assoluta.
Per questo triangolo, vale la relazione

dove è l’angolo che la velocità forma con la direzione radiale. Questo angolo è dato da

in cui  rappresenta la distanza percorsa nell’intervallo di tempo
rappresenta la distanza percorsa nell’intervallo di tempo  . Questa è data dal valore assoluto
. Questa è data dal valore assoluto  . Pertanto, l’angolo è dato da
. Pertanto, l’angolo è dato da
![\[\boxcolorato{fisica}{\alpha= \arctan \left( \dfrac{\left \vert\omega\right \vert |r_0+v_rt^*|}{\left \vert v_r\right \vert } \right).}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ed3e3fa62b8ce475440dff3d5ede4e3b_l3.svg "Rendered by QuickLaTeX.com")
Si osservi che per dedurre la direzione della velocità si è usato il metodo punta-coda. È interessante osservare che dipende dal tempo, pertanto istante per istante cambia direzione.
Siano e rispettivamente i versori dell’asse delle e delle . Esprimiamo per completezza rispetto ai versori e . Abbiamo dunque

o anche
![\[\boxcolorato{fisica}{\begin{split} \vec{v}_a=&-\sqrt{ v_r^2 + (\omega r^\prime)^2} \cos \left(\arctan \left( \dfrac{\left \vert \omega\right \vert |r_0+v_rt^*|}{\left \vert v_r\right \vert } \right)\right) \hat{x}- \\ &-\sqrt{ v_r^2 + (\left \vert \omega\right \vert r^\prime)^2} \sin \left(\arctan \left( \dfrac{\omega |r_0+v_rt^*|}{\left \vert v_r\right \vert } \right)\right) \hat{y}.\end{split}}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f045e80d5e4b0ff1e9ef4ee351ad72f6_l3.svg "Rendered by QuickLaTeX.com")
. Si consideri un punto materiale di massa  su un piano orizzontale liscio soggetto ad una accelerazione espressa in coordinate polari pari ad
su un piano orizzontale liscio soggetto ad una accelerazione espressa in coordinate polari pari ad
![\[\vec{a}=\dfrac{1}{r}\hat{\theta}\,\left[\dfrac{\mathrm{m}}{\mathrm{s}^2}\right].\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e8d70671fad68a32ef4873ee91147780_l3.svg "Rendered by QuickLaTeX.com")
Con le seguenti condizioni iniziali
![\begin{equation*} r(1)=1\,[\mathrm{m}] \quad \mbox{e} \quad \dfrac{d\theta }{dt}(1)=1 \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4cf4ac90b885c9d57160a436c2b8ec75_l3.svg "Rendered by QuickLaTeX.com")
verificare che le condizioni del problema soddisfano la seguente relazione:
![\[r^3\dfrac{dr}{dt}- 3\int r^2\left(\dfrac{dr}{dt}\right)^2dt=\dfrac{t^3}{3}+k \quad \mbox{ con } \, k\in \mathbb{R}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-366932ba24e8b0013b40729185ce26af_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento.
![\begin{equation*} \begin{cases} \dfrac{d^2r}{dt^2}-r\left(\dfrac{d\theta}{dt}\right)^2=0\\\\ \dfrac{1}{r}\dfrac{d(r^2\frac{d\theta }{dt})}{dt}=\dfrac{1}{r}\\\\ r(1)=1\,[\mathrm{m}]\\\\ \dfrac{d\theta }{dt}(1)=1\,\left[\dfrac{\mathrm{rad}}{\mathrm{s}}\right]. \end{cases} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-00cc486dbd5572c648e181f771959152_l3.svg "Rendered by QuickLaTeX.com")
![\[\begin{aligned} &\dfrac{1}{r}\dfrac{d(r^2\frac{d\theta }{dt})}{dt}=\dfrac{1}{r}\quad \Leftrightarrow\\ &\Leftrightarrow\quad\dfrac{d(r^2\frac{d\theta }{dt})}{dt}=1\quad\Leftrightarrow\\ &\Leftrightarrow \quad\int\dfrac{d(r^2\frac{d\theta }{dt})}{dt}dt=\int 1 dt\quad\Leftrightarrow\\ &\Leftrightarrow\quad r^2\frac{d\theta }{dt}=t+c_1 \quad \mbox{con } \,c_1\in \mathbb{R}\\ \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1b791b7a53888a387fdadcb5a6d0951b_l3.svg "Rendered by QuickLaTeX.com")
![\[1=1+c_1 \quad\Leftrightarrow \quad c_1=0,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7777477d084d8857a9ef28810be42d74_l3.svg "Rendered by QuickLaTeX.com")
![\[r^2\frac{d\theta }{dt}=t\Leftrightarrow \frac{d\theta }{dt}=\dfrac{t}{r^2}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d88be01360d8f85b222461b7c6b38af6_l3.svg "Rendered by QuickLaTeX.com")
![\[\begin{aligned} \dfrac{d^2r}{dt^2}-r\left(\dfrac{d\theta}{dt}\right)^2=0\quad &\Leftrightarrow \quad \dfrac{d^2r}{dt^2}-r\left( \dfrac{t}{r^2}\right)^2=0 \quad\Leftrightarrow\\ &\Leftrightarrow\quad \dfrac{d^2r}{dt^2}=r\left( \dfrac{t}{r^2}\right)^2=\dfrac{t^2}{r^3}\quad\Leftrightarrow\\ &\Leftrightarrow \quad\int r^3 \dfrac{d^2r}{dt^2}dt=\int t^2dt\quad\Leftrightarrow\\ &\Leftrightarrow\quad \int \left(\dfrac{d(r^3\frac{dr}{dt})}{dt}-3r^2\left(\dfrac{dr}{dt}\right)^2\right)dt=\dfrac{t^3}{3}+c_2\quad\Leftrightarrow\\ &\Leftrightarrow \quad r^3\dfrac{dr}{dt}- 3\int r^2\left(\dfrac{dr}{dt}\right)^2dt=\dfrac{t^3}{3}+c_2 \quad \mbox{ con } \, c_2\in \mathbb{R}. \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1a8dcad98fcc161607b3f5dcefe7ee78_l3.svg "Rendered by QuickLaTeX.com")
![\[\boxcolorato{fisica}{r^3\dfrac{dr}{dt}- 3\int r^2\left(\dfrac{dr}{dt}\right)^2dt=\dfrac{t^3}{3}+k, \quad \mbox{ con } \, k\in \mathbb{R}. }\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-10257bb79f55f4bc1297af6aa31d21e7_l3.svg "Rendered by QuickLaTeX.com") . Si consideri un punto materiale di massa su un piano orizzontale liscio soggetto ad una accelerazione espressa in coordinate polari pari ad
. Si consideri un punto materiale di massa su un piano orizzontale liscio soggetto ad una accelerazione espressa in coordinate polari pari ad![\begin{equation*} \vec{a}=\dfrac{1}{r}\hat{\theta}\,\left[\dfrac{\mathrm{m}}{\mathrm{s}^2}\right] \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ada25ab476677da1a7317bc1023412b4_l3.svg "Rendered by QuickLaTeX.com")
con le seguenti condizioni iniziali
![\begin{equation*} r(1)=1\,\,[\mathrm{m}],\quad \dfrac{d\theta }{dt}(1)=1\,\left[\dfrac{\mathrm{rad}}{\mathrm{s}}\right] \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2a7dca07242a3e15bb0d731d193cde82_l3.svg "Rendered by QuickLaTeX.com")
![\begin{equation*} \dfrac{dr }{dt}(1)=\dfrac{4}{3}\left[\dfrac{\mathrm{m}}{\mathrm{s}}\right]. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d7687a56b482876fb814fa6e07e49691_l3.svg "Rendered by QuickLaTeX.com")
Verificare oppure confutare che le condizioni del problema soddisfino la seguente relazione:

Svolgimento.
![\[\vec{a}=\left(\dfrac{d^2r}{dt^2}-r\left(\dfrac{d\theta}{dt}\right)^2\right)\hat{r}+ \left(\dfrac{1}{r}\dfrac{d(r^2\frac{d\theta }{dt})}{dt} \right)\hat{\theta}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-261f2a115dc4e14d482bf191d407044b_l3.svg "Rendered by QuickLaTeX.com")
e confrontandola con (116) possiamo scrivere il seguente problema di Cauchy:
![\begin{equation*} \begin{cases} \dfrac{d^2r}{dt^2}-r\left(\dfrac{d\theta}{dt}\right)^2=0\\\\ \dfrac{1}{r}\dfrac{d(r^2\frac{d\theta }{dt})}{dt}=\dfrac{1}{r}\\\\ r(1)=1\,[\mathrm{m}]\\\\ \dfrac{d\theta }{dt}(1)=1\,\left[\dfrac{\mathrm{rad}}{\mathrm{s}}\right]\\\\ \dfrac{dr }{dt}(1)=\dfrac{4}{3}\left[\dfrac{\mathrm{m}}{\mathrm{s}}\right]. \end{cases} \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ad6a13d7d17f238c65c2abc147a42844_l3.svg "Rendered by QuickLaTeX.com")
Risolviamo l’equazione differenziale (120)
![\[\begin{aligned} &\dfrac{1}{r}\dfrac{d(r^2\frac{d\theta }{dt})}{dt}=\dfrac{1}{r}\quad \Leftrightarrow\\ &\Leftrightarrow\quad\dfrac{d(r^2\frac{d\theta }{dt})}{dt}=1\quad\Leftrightarrow\\ &\Leftrightarrow \quad\int\dfrac{d(r^2\frac{d\theta }{dt})}{dt}dt=\int 1 dt\quad \Leftrightarrow\\ &\Leftrightarrow \quad r^2\frac{d\theta }{dt}=t+c_1, \quad \mbox{con } \,c_1\in \mathbb{R}. \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-bf3b9f5deeed53e1bdfcd6a4098bce4d_l3.svg "Rendered by QuickLaTeX.com")
Dalle condizioni iniziali (117) otteniamo
![\[1=1+c_1\quad \Leftrightarrow \quad c_1=0,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-cc69e8590566db5da8da27e0ca4ec13e_l3.svg "Rendered by QuickLaTeX.com")
quindi
![\[r^2\frac{d\theta }{dt}=t\quad \Leftrightarrow\quad \frac{d\theta }{dt}=\dfrac{t}{r^2}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-3f67b402076909681e61a95f18312d27_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo  in (120) abbiamo
in (120) abbiamo
![\[\begin{aligned} &\dfrac{d^2r}{dt^2}-r\left(\dfrac{d\theta}{dt}\right)^2=0 \quad \Leftrightarrow \quad \\ & \Leftrightarrow \quad \dfrac{d^2r}{dt^2}-r\left( \dfrac{t}{r^2}\right)^2=0 \quad\Leftrightarrow\\ &\Leftrightarrow \quad \dfrac{d^2r}{dt^2}=r\left( \dfrac{t}{r^2}\right)^2=\dfrac{t^2}{r^3}\quad\Leftrightarrow\\ &\Leftrightarrow \quad\int r^3 \dfrac{d^2r}{dt^2}dt=\int t^2dt\quad\Leftrightarrow\\ &\Leftrightarrow \quad\int \left(\dfrac{d(r^3\frac{dr}{dt})}{dt}-3r^2\left(\dfrac{dr}{dt}\right)^2\right)dt=\dfrac{t^3}{3}+c_2\quad\Leftrightarrow\\ &\Leftrightarrow \quad r^3\dfrac{dr}{dt}- 3\int r^2\left(\dfrac{dr}{dt}\right)^2dt=\dfrac{t^3}{3}+c_2 \quad \mbox{ con } \, c_2\in \mathbb{R}\\ \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ae7288dab08c52cd248168e124179954_l3.svg "Rendered by QuickLaTeX.com")
Posto  otteniamo la seguente relazione
otteniamo la seguente relazione
![\[\boxcolorato{fisica}{r^3\dfrac{dr}{dt}- 3\int r^2\left(\dfrac{dr}{dt}\right)^2dt=\dfrac{t^3}{3}+k, \quad \mbox{ con } \, k\in \mathbb{R}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a421dae55458278d72f988dcf29da62e_l3.svg "Rendered by QuickLaTeX.com")
Si osserva chiaramente che (??) differisce da (119). Questa osservazione ci fa concludere che le condizioni del problema non verificano (119). Si vuole far osservare che per arrivare alle (119) bisognava commettere il seguente errore:
![\[\begin{aligned} & \int r^3 \dfrac{d^2r}{dt^2}dt=\int t^2dt \quad \Leftrightarrow\\ &\Leftrightarrow\quad \int \left(\dfrac{d(r^3\frac{dr}{dt})}{dt}-3r^2\dfrac{dr}{dt}\right)dt=\dfrac{t^3}{3}+c_2\quad \Leftrightarrow\\ &\Leftrightarrow \quad r^3\dfrac{dr}{dt}-r^3=\dfrac{t^3}{3}+c_2 \quad \mbox{ con } \, c_2\in \mathbb{R}. \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-c1627a78f362c6da2d6ff08aa088b06d_l3.svg "Rendered by QuickLaTeX.com")
Dalle condizioni ![r(1)=1 [\mathrm{m}],\,\dfrac{dr}{dt}(1)=\dfrac{4}{3}\left[\dfrac{\mathrm{m}}{\mathrm{s}}\right]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1a4e139fb22700df1e34bdf62db4cf95_l3.svg "Rendered by QuickLaTeX.com") otteniamo
otteniamo
![\[c_2=0,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-5acd6ec5fff7fc718cccc9a23ec22f48_l3.svg "Rendered by QuickLaTeX.com")
quindi
![\[\boxcolorato{fisica}{r^3\dfrac{dr}{dt}-r^3=\dfrac{t^3}{3}.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-35ba509464699546278ce9425f4b69dc_l3.svg "Rendered by QuickLaTeX.com")
L’errore commesso è il seguente
![\[r^3 \dfrac{d^2r}{dt^2}=\dfrac{d(r^3\frac{dr}{dt})}{dt}-3r^2\dfrac{dr}{dt}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b510e657e1de1a54a4190cd33efedc10_l3.svg "Rendered by QuickLaTeX.com")
Chiaramente
![\[r^3 \dfrac{d^2r}{dt^2}\neq\dfrac{d(r^3\frac{dr}{dt})}{dt}-3r^2\dfrac{dr}{dt},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e2261de1d664303d9dfb4bea40962e29_l3.svg "Rendered by QuickLaTeX.com")
la relazione corretta è quella che segue
![\[r^3\dfrac{d^2r}{dt^2}=\dfrac{d(r^3\frac{dr}{dt})}{dt}-3r^2\left(\dfrac{dr}{dt}\right)^2 .\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f014025d553a527f9a67dea484572a3f_l3.svg "Rendered by QuickLaTeX.com")
Tutti gli esercizi di elettromagnetismo
Se si desidera proseguire con gli esercizi, di seguito è disponibile una vasta raccolta che copre interamente gli argomenti del programma di Elettromagnetismo. Questa raccolta include spiegazioni dettagliate e gli esercizi sono organizzati in base al livello di difficoltà, offrendo un supporto completo per lo studio e la pratica.
Leggi...
- Esercizi su lavoro elettrico e potenziale elettrico.
- Esercizi sulla legge di Gauss.
- Esercizi sui conduttori, condensatori, dielettrici ed energia elettrostatica.
- Esercizi sulla corrente elettrica.
- Esercizi sul campo magnetico e forza magnetica.
- Esercizi sulle sorgenti di un campo magnetico e legge di Ampere.
- Esercizi su campi elettrici e magnetici variabili nel tempo.
- Esercizi su oscillazione del campo elettrico e correnti alternate.
- Esercizi sulle onde elettromagnetiche.
- Esercizi sulla riflessione e rifrazione della luce.
- Esercizi sull’ ottica geometrica.
- Esercizi sull’ interferenza.
- Esercizi sulla diffrazione.
- Esercizi sulle proprietà corpuscolari e ondulatorie della materia.
Per chi intende verificare le proprie competenze, è stata predisposta una raccolta di esercizi misti di elettromagnetismo.
Esercizi di Meccanica classica
Se siete interessati ad approfondire argomenti inerenti alla Meccanica Classica, di seguito troverete tutte le cartelle relative presenti sul sito Qui Si Risolve. Ciascuna cartella contiene numerosi esercizi con spiegazioni dettagliate, progettate per offrire una preparazione solida e una conoscenza approfondita della materia.
Leggi..
- Cinematica del punto materiale.
- Dinamica del punto materiale: le leggi di Newton nella meccanica classica.
- Dinamica del punto materiale: lavoro ed energia.
- Moti relativi.
- Sistemi di punti materiali.
- Dinamica del corpo rigido.
- Urti .
- Gravitazione .
- Oscillazioni e onde.
- Meccanica dei fluidi.
- Onde meccaniche.
- Statica in meccanica classica.
- Fondamenti di relatività ristretta: trasformazioni di Lorentz e principali conseguenze.
- Calcolo del centro di massa e dei momenti d’inerzia.
Ulteriori risorse didattiche per la fisica
Leggi...
- Physics Stack Exchange – Parte della rete Stack Exchange, questo sito è un forum di domande e risposte specificamente dedicato alla fisica. È un’ottima risorsa per discutere e risolvere problemi di fisica a tutti i livelli, dall’elementare all’avanzato.
- ArXiv – ArXiv è un archivio di preprint per articoli di ricerca in fisica (e in altre discipline scientifiche). Gli articoli non sono peer-reviewed al momento della pubblicazione su ArXiv, ma rappresentano un’importante risorsa per rimanere aggiornati sugli sviluppi più recenti nella ricerca fisica.
- Phys.org – Questo sito offre notizie e aggiornamenti su una vasta gamma di argomenti scientifici, con un focus particolare sulla fisica. È una risorsa utile per rimanere aggiornati sugli ultimi sviluppi nella ricerca e nelle scoperte fisiche.
- Physics Forums – Una delle comunità online più grandi per la fisica e la scienza in generale. Offre discussioni su vari argomenti di fisica, aiuto con i compiti, e discussioni su articoli di ricerca.
- The Feynman Lectures on Physics – Questo sito offre accesso gratuito alla famosa serie di lezioni di fisica di Richard Feynman, un’ottima risorsa per studenti di fisica di tutti i livelli.
- American Physical Society (APS) – La APS è una delle organizzazioni più importanti per i fisici. Il sito offre accesso a pubblicazioni, conferenze, risorse educative e aggiornamenti sulle novità del mondo della fisica.
- Institute of Physics (IOP) – L’IOP è un’importante organizzazione professionale per i fisici. Il sito offre risorse per l’apprendimento, accesso a riviste scientifiche, notizie e informazioni su eventi e conferenze nel mondo della fisica.
- Physics World – Physics World è una rivista online che offre notizie, articoli, interviste e approfondimenti su vari argomenti di fisica. È una risorsa preziosa per chiunque sia interessato agli sviluppi contemporanei nella fisica.
- Quanta Magazine (sezione Fisica) – Quanta Magazine è una pubblicazione online che copre notizie e articoli di approfondimento su matematica e scienze. La sezione fisica è particolarmente interessante per i contenuti di alta qualità e le spiegazioni approfondite.
- Perimeter Institute – Il Perimeter Institute è un importante centro di ricerca in fisica teorica. Il sito offre accesso a conferenze, workshop e materiale educativo, ed è un’ottima risorsa per chi è interessato alla fisica teorica avanzata.