Esercizio sui sistemi di punti materiali 8 rappresenta l’ottavo problema della raccolta dedicata agli esercizi misti sui sistemi di punti materiali. Questo esercizio costituisce la naturale prosecuzione dell’Esercizio sui sistemi di punti materiali 7, e segue l’Esercizio sui sistemi di punti materiali 9.
Questo esercizio è concepito per gli studenti del corso di Fisica 1 ed è particolarmente indicato per coloro che intraprendono studi in ingegneria, fisica o matematica, fornendo un’opportunità per applicare i principi della meccanica classica ai sistemi di punti materiali.
L’argomento successivo a questa sezione è la dinamica del corpo rigido, mentre l’argomento precedente riguarda gli esercizi sui moti relativi.
Testo esercizio sistemi di punti materiali 8
 . Agli estremi di un’asta di lunghezza
. Agli estremi di un’asta di lunghezza  e massa trascurabile, sono saldati due pattini, di masse
e massa trascurabile, sono saldati due pattini, di masse  e
e  , che si appoggiano su una guida circolare di raggio
, che si appoggiano su una guida circolare di raggio  , posta su un piano orizzontale. Sull’asta, a distanza
, posta su un piano orizzontale. Sull’asta, a distanza  dal pattino di massa , si trova una persona di massa
dal pattino di massa , si trova una persona di massa  . L’asta è vincolata a ruotare rispetto al centro del disco e inizialmente possiede una velocità angolare
. L’asta è vincolata a ruotare rispetto al centro del disco e inizialmente possiede una velocità angolare  .
.
La persona si sposta e si porta a distanza  dal pattino di massa ; si calcoli la velocità angolare
dal pattino di massa ; si calcoli la velocità angolare  del moto circolare dei pattini dopo lo spostamento della persona e il lavoro eseguito da questa per spostarsi, esprimendo i risultati in funzione di , , , e .
del moto circolare dei pattini dopo lo spostamento della persona e il lavoro eseguito da questa per spostarsi, esprimendo i risultati in funzione di , , , e .
![\[\quad\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-27e49cccda278470ae7436bace68813e_l3.svg "Rendered by QuickLaTeX.com")
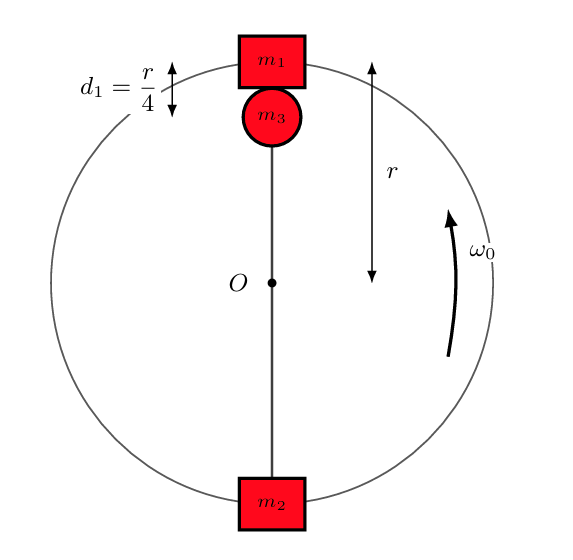
Figura 1: configurazione iniziale.
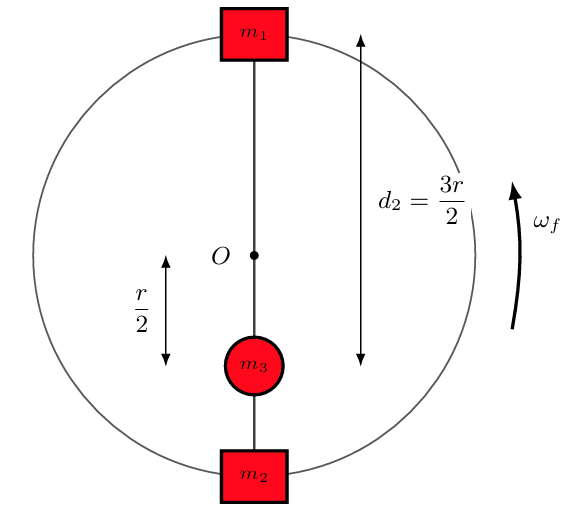
Figura 2: configurazione finale.
Svolgimento.
e , dall’asta di massa trascurabile e dalla persona di massa . La guida circolare, il piano orizzontale, l’eventuale vincolo centrale in  e la Terra non fanno parte del sistema. Di conseguenza, le forze che questi corpi esercitano sui pattini, sull’asta e sulla persona sono forze esterne; le forze scambiate tra persona, asta e pattini sono invece forze interne. Questa scelta è necessaria, perché la classificazione tra forze interne ed esterne dipende proprio dal sistema fisico considerato.
e la Terra non fanno parte del sistema. Di conseguenza, le forze che questi corpi esercitano sui pattini, sull’asta e sulla persona sono forze esterne; le forze scambiate tra persona, asta e pattini sono invece forze interne. Questa scelta è necessaria, perché la classificazione tra forze interne ed esterne dipende proprio dal sistema fisico considerato.
Si ricorda che, dato un sistema di  punti materiali, valgono le seguenti leggi fondamentali
punti materiali, valgono le seguenti leggi fondamentali
(1) 
dove  è la somma di tutte le forze esterne,
è la somma di tutte le forze esterne,  è la quantità di moto totale del sistema,
è la quantità di moto totale del sistema,  è la somma di tutti i momenti esterni calcolati rispetto al polo
è la somma di tutti i momenti esterni calcolati rispetto al polo  ,
,  è la velocità del polo scelto per il calcolo del momento angolare totale del sistema1, ed infine
è la velocità del polo scelto per il calcolo del momento angolare totale del sistema1, ed infine  è il momento angolare totale del sistema rispetto al polo . Poiché
è il momento angolare totale del sistema rispetto al polo . Poiché  , con
, con  , il secondo termine al primo membro può anche essere scritto nella forma
, il secondo termine al primo membro può anche essere scritto nella forma  .
.
Si sceglie un sistema di riferimento inerziale  , fisso rispetto al piano orizzontale, con origine nel centro della guida e asse
, fisso rispetto al piano orizzontale, con origine nel centro della guida e asse  perpendicolare al piano del moto. Per comodità geometrica, nell’istante
perpendicolare al piano del moto. Per comodità geometrica, nell’istante  in cui si rappresenta la configurazione, l’asse
in cui si rappresenta la configurazione, l’asse  viene orientato lungo l’asta. Questo non significa che il riferimento sia solidale con l’asta: il sistema resta inerziale e non ruota insieme al sistema materiale.
viene orientato lungo l’asta. Questo non significa che il riferimento sia solidale con l’asta: il sistema resta inerziale e non ruota insieme al sistema materiale.

Figura 3: riferimento inerziale .
Se si sceglie come polo per il calcolo dei momenti, essendo tale punto fisso nel riferimento inerziale scelto, si ha
![\[ \vec{v}_{O^\prime}\wedge\vec{P}_t=\vec{v}_{O}\wedge\vec{P}_t=\vec{0}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b3dff54914be55ea80d751beb5b1a4d0_l3.svg "Rendered by QuickLaTeX.com")
I pattini sono saldati agli estremi dell’asta e scorrono sulla guida circolare, perciò restano sempre a distanza dal centro . Nell’ipotesi di guida ideale e liscia, la guida esercita sui pattini soltanto le reazioni vincolari normali alla guida, cioè radiali; tali reazioni servono a imporre il vincolo circolare e possono fornire la parte centripeta dell’accelerazione, ma hanno momento nullo rispetto a e lavoro nullo, perché sono perpendicolari allo spostamento istantaneo dei pattini. La componente tangenziale delle forze che modifica la velocità dei pattini non proviene dalla guida ideale: essa viene trasmessa dall’asta e dalla persona, quindi è interna al sistema fisico scelto. L’eventuale reazione del vincolo centrale applicato in ha momento nullo rispetto a , perché il suo punto di applicazione coincide con il polo scelto.
I pesi della persona e dei pattini sono verticali. Anche le reazioni normali del piano sono verticali. Nell’istante rappresentato i punti materiali stanno sull’asse , dunque i loro vettori posizione rispetto a sono orizzontali; il momento di una forza verticale applicata in un punto dell’asse è diretto lungo l’asse  e non possiede componente lungo l’asse . Pertanto il momento risultante delle forze esterne rispetto all’asse è nullo:
e non possiede componente lungo l’asse . Pertanto il momento risultante delle forze esterne rispetto all’asse è nullo:
![\[ \sum_{k=1}^{n}M^{\mathrm{ext}}_{O,z,k}=0, \qquad k\in\{1,\ldots,n\}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-918883627920a07ef68da73ba535ea56_l3.svg "Rendered by QuickLaTeX.com")
La seconda equazione in (1), proiettata lungo l’asse , diventa quindi
(2) 
dove  è una costante e
è una costante e ![[c]=\mathrm{kg}\,\mathrm{m}^2\,\mathrm{s}^{-1}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-48355e817cae2c9a4eb9bec43e20c9ed_l3.svg "Rendered by QuickLaTeX.com") . Si conserva dunque la componente del momento angolare rispetto all’asse .
. Si conserva dunque la componente del momento angolare rispetto all’asse .
Per un punto materiale si ricorda che il momento angolare rispetto al polo è definito da
(3) 
dove  è il vettore posizione del punto materiale rispetto al polo e
è il vettore posizione del punto materiale rispetto al polo e  è la sua quantità di moto. La distanza dal polo non è il vettore , ma il suo modulo.
è la sua quantità di moto. La distanza dal polo non è il vettore , ma il suo modulo.
Si osservi ora la geometria iniziale.
Figura 4: geometria iniziale.
La distanza della persona dal centro non coincide con  o con
o con  , perché questi dati sono misurati dal pattino di massa . Poiché si trova a un estremo dell’asta e è il punto medio, la distanza iniziale della persona dal centro è
, perché questi dati sono misurati dal pattino di massa . Poiché si trova a un estremo dell’asta e è il punto medio, la distanza iniziale della persona dal centro è
![\[ d_i=r-d_1=r-\dfrac{r}{4}=\dfrac{3r}{4}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-419e40d1250020461a0c31a057d963a6_l3.svg "Rendered by QuickLaTeX.com")
Nelle configurazioni iniziale e finale la persona è ferma rispetto all’asta. Durante lo spostamento, invece, essa scorre lungo l’asta e quindi non resta su una stessa circonferenza centrata in . Per questo motivo non si descrive il moto della persona come un moto circolare attorno a durante tutta la trasformazione: si usano soltanto le due configurazioni, prima e dopo lo spostamento. In ciascuna di esse, una volta fissata la distanza  dal centro, la velocità tangenziale di un punto solidale con l’asta ha modulo
dal centro, la velocità tangenziale di un punto solidale con l’asta ha modulo
![\[ v=\ell\omega. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ae5cf1baa91016bff47308d5e7f692d1_l3.svg "Rendered by QuickLaTeX.com")
All’istante iniziale si ha quindi
(4) 
che sono rispettivamente le velocità iniziali di , e 
Il momento angolare iniziale del sistema rispetto all’asse passante per è
![\[ \vec{L}_i= \left(rm_1v_{1,i}+rm_2v_{2,i}+d_i m_3v_{3,i}\right)\hat{z}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2828900dbe7174f7eb2b798858704473_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo le velocità precedenti, si ottiene
![\[ \vec{L}_i= \left(m_1r^2\omega_0+m_2r^2\omega_0+m_3\left(\dfrac{3r}{4}\right)^2\omega_0\right)\hat{z}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9422a1ee37b371a74d691c8e7c187b3d_l3.svg "Rendered by QuickLaTeX.com")
In forma scalare, lungo l’asse , risulta
(5) 
Dopodiché, la persona si sposta dalla posizione iniziale e si porta a distanza
![\[ d_2=\dfrac{3r}{2} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1437de491a1db5c7d1e36179ebba1aaf_l3.svg "Rendered by QuickLaTeX.com")
dal pattino di massa . La sua distanza dal centro diventa quindi
![\[ d_f=\left|d_2-r\right|=\left|\dfrac{3r}{2}-r\right|=\dfrac{r}{2}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-33ce1409a9ac17d4b24178eb1ab200b0_l3.svg "Rendered by QuickLaTeX.com")
Terminato lo spostamento, la persona è nuovamente ferma rispetto all’asta; il sistema assume allora una nuova velocità angolare di modulo .
Si calcola il momento angolare finale del sistema attraverso la geometria seguente.
Figura 5: geometria finale.
Nella configurazione finale si ha
![\[ \vec{L}_f= \left(m_1r_{1,f}v_{1,f}+m_2r_{2,f}v_{2,f}+m_3d_fv_{3,f}\right)\hat{z}, \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-bcb0a4a851d9ad589e21f62d3a9a4bb3_l3.svg "Rendered by QuickLaTeX.com")
 e
e
(6) 
 e
e
(7) 
Per la persona, invece,
![\[ d_f=\dfrac{r}{2}, \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e0e373a12a8a65d815c7da14a3e79dcf_l3.svg "Rendered by QuickLaTeX.com")
(8) 
Pertanto il momento angolare finale diventa
![\[ \vec{L}_f= \left(m_1r^2\omega_f+m_2r^2\omega_f+\dfrac{1}{4}m_3r^2\omega_f\right)\hat{z}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4dbb9ddda0435a8397021d87baa93320_l3.svg "Rendered by QuickLaTeX.com")
(9) 
Si noti che nel momento angolare compare una sola potenza di ; la potenza  compare invece nel calcolo dell’energia cinetica.
compare invece nel calcolo dell’energia cinetica.
Per (2) si può imporre
![\[ L_{O,z,i}=L_{O,z,f}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e1248f93d5f224bb9c8dc03b58232424_l3.svg "Rendered by QuickLaTeX.com")
![\[ r^2\omega_0\left(m_1+m_2+\dfrac{9}{16}m_3\right) = r^2\omega_f\left(m_1+m_2+\dfrac{1}{4}m_3\right), \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a30f2b7e58f8f04ba4e1990e1e2a738e_l3.svg "Rendered by QuickLaTeX.com")
da cui
![\[ \omega_0\left(m_1+m_2+\dfrac{9}{16}m_3\right) = \omega_f\left(m_1+m_2+\dfrac{1}{4}m_3\right). \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-75051c0156b598c6338246f46d096758_l3.svg "Rendered by QuickLaTeX.com")
Dunque la velocità angolare finale, espressa in funzione di , , e , è
![\[\boxcolorato{fisica}{ \omega_f=\omega_0\left( \dfrac{m_1+m_2 +\dfrac{9}{16}m_3}{m_1+m_2+\dfrac{1}{4}m_3}\right). }\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-37ac81e99e6fbce620246f1b67b6eb74_l3.svg "Rendered by QuickLaTeX.com")
Poiché  , il rapporto è maggiore di
, il rapporto è maggiore di  : la persona si avvicina all’asse di rotazione e la velocità angolare aumenta.
: la persona si avvicina all’asse di rotazione e la velocità angolare aumenta.
Per il secondo punto del problema è utile ricordare il teorema delle forze vive, o dell’energia cinetica, nel caso di un sistema di punti materiali. Esso afferma che la somma dei lavori delle forze esterne e interne è uguale alla variazione dell’energia cinetica totale del sistema, cioè
(10) 
dove
![\[ K_{t,i}=\sum_{k=1}^{n}\dfrac{1}{2}m_kv_{k,i}^2, \qquad K_{t,f}=\sum_{k=1}^{n}\dfrac{1}{2}m_kv_{k,f}^2, \qquad k\in\{1,\ldots,n\}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8e1a14b896b18ae113e878fcfa6ebbe8_l3.svg "Rendered by QuickLaTeX.com")
Nel problema in esame il lavoro complessivo delle forze esterne è nullo. I pesi e le reazioni normali del piano sono perpendicolari agli spostamenti, che avvengono nel piano orizzontale; perciò il loro lavoro è nullo. Le reazioni della guida ideale sui pattini sono radiali, mentre gli spostamenti istantanei dei pattini lungo la guida sono tangenziali; dunque anche tali reazioni compiono lavoro nullo. La forza tangenziale che cambia la velocità dei pattini non è una forza esterna della guida ideale, ma una forza trasmessa dall’asta, quindi interna al sistema scelto. L’eventuale reazione del vincolo centrale in ha punto di applicazione fisso e compie lavoro nullo. Rimane il lavoro interno associato allo spostamento della persona lungo l’asta, che si indica con  .
.
Si considera la situazione iniziale, cioè quando il sistema ha velocità angolare . L’energia cinetica totale iniziale è
![\[ K_{t,i}=\sum_{k=1}^{3}\dfrac{1}{2}m_kv_{k,i}^2 =\dfrac{1}{2}m_1v_{1,i}^2+ \dfrac{1}{2}m_2v_{2,i}^2+ \dfrac{1}{2}m_3v^2_{3,i}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-783c4c6cabf471c1b5d7306d85aa4fbb_l3.svg "Rendered by QuickLaTeX.com")
Per (4) si ha
![\[ \begin{aligned} K_{t,i} &=\dfrac{1}{2}m_1r^2\omega_0^2+ \dfrac{1}{2}m_2r^2\omega_0^2+ \dfrac{1}{2}m_3\left(\dfrac{3r}{4}\omega_0\right)^2\\ &=\dfrac{1}{2}r^2\omega_0^2\left(m_1+m_2+\dfrac{9}{16}m_3\right). \end{aligned} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-512c3d3a266c5aff636934baa5be861c_l3.svg "Rendered by QuickLaTeX.com")
Ora si considera la situazione finale, cioè quando il sistema ha velocità angolare finale . L’energia cinetica totale finale è
![\[ K_{t,f}=\sum_{k=1}^{3}\dfrac{1}{2}m_kv_{k,f}^2 =\dfrac{1}{2}m_1v_{1,f}^2+ \dfrac{1}{2}m_2v_{2,f}^2+ \dfrac{1}{2}m_3v^2_{3,f}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b1a4ded33246474cfab022c5e4cc9707_l3.svg "Rendered by QuickLaTeX.com")
Per (6), (7) e (8), si ottiene
![\[ \begin{aligned} K_{t,f} &=\dfrac{1}{2}m_1r^2\omega_f^2+ \dfrac{1}{2}m_2r^2\omega_f^2+ \dfrac{1}{2}m_3\left(\dfrac{r}{2}\omega_f\right)^2\\ &=\dfrac{1}{2}r^2\omega_f^2\left(m_1+m_2+\dfrac{1}{4}m_3\right). \end{aligned} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ac18ec76b37204a52830313d5ecfd24d_l3.svg "Rendered by QuickLaTeX.com")
Dal teorema dell’energia cinetica segue quindi
![\[ W_{\mathrm{persona}}=K_{t,f}-K_{t,i}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4e0b226c3a7d8bc953bbd7e2f63f1451_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo le due energie cinetiche appena calcolate, si ha
![\[ \begin{aligned} W_{\mathrm{persona}} &=\dfrac{1}{2}r^2 \omega_f^2\left( m_1+ m_2+\dfrac{1}{4}m_3 \right) -\dfrac{1}{2}r^2\omega_0^2\left(m_1+m_2+\dfrac{9}{16}m_3 \right)\\ &=\dfrac{1}{2}r^2\omega_0^2\left( \dfrac{m_1+m_2 +\dfrac{9}{16}m_3}{m_1+m_2+\dfrac{1}{4}m_3}\right)^2 \left( m_1+m_2+\dfrac{1}{4}m_3 \right) -\dfrac{1}{2}r^2\omega_0^2\left(m_1+m_2+\dfrac{9}{16}m_3 \right)\\ &=\dfrac{1}{2}r^2\omega_0^2\left[ \left( \dfrac{m_1+m_2 +\dfrac{9}{16}m_3}{m_1+m_2+\dfrac{1}{4}m_3}\right)^2 \left( m_1+m_2+\dfrac{1}{4}m_3 \right) -\left(m_1+m_2+\dfrac{9}{16}m_3 \right) \right]. \end{aligned} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d7f324bb58a978c2a952bd629e1909cc_l3.svg "Rendered by QuickLaTeX.com")
Dunque il lavoro fatto dalla persona, espresso in funzione di , , , e , è
![\[\boxcolorato{fisica}{ W_{\mathrm{persona}}=\dfrac{1}{2}r^2\omega_0^2\left[ \left( \dfrac{m_1+m_2 +\dfrac{9}{16}m_3}{m_1+m_2+\dfrac{1}{4}m_3}\right)^2 \left( m_1+m_2+\dfrac{1}{4}m_3 \right)- \left(m_1+m_2+\dfrac{9}{16}m_3 \right) \right]. }\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-75a26e8bb26d5fdf1428597c376a2304_l3.svg "Rendered by QuickLaTeX.com")
La stessa espressione può essere scritta in forma più compatta. Infatti, se
![\[ A=m_1+m_2+\dfrac{9}{16}m_3, \qquad B=m_1+m_2+\dfrac{1}{4}m_3, \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9731a41787ddf8bbad50540a2490f7ba_l3.svg "Rendered by QuickLaTeX.com")
allora
![\[ W_{\mathrm{persona}}=\dfrac{1}{2}r^2\omega_0^2\left(\dfrac{A^2}{B}-A\right) =\dfrac{1}{2}r^2\omega_0^2\dfrac{A(A-B)}{B}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b9eded74f501cdedbfeb641a65a430d9_l3.svg "Rendered by QuickLaTeX.com")
Poiché
![\[ A-B=\dfrac{9}{16}m_3-\dfrac{1}{4}m_3=\dfrac{5}{16}m_3, \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f3e6e4ce25a98d5a3915721c7a217b19_l3.svg "Rendered by QuickLaTeX.com")
si ottiene anche
![\[\boxcolorato{fisica}{ W_{\mathrm{persona}} = \dfrac{5}{32}m_3r^2\omega_0^2 \dfrac{m_1+m_2+\dfrac{9}{16}m_3}{m_1+m_2+\dfrac{1}{4}m_3}. }\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4afb3e8e8765b8757fcaf7e3b32ebbbf_l3.svg "Rendered by QuickLaTeX.com")
Il lavoro è positivo, come atteso: la persona si avvicina all’asse di rotazione, il momento d’inerzia complessivo diminuisce e la velocità angolare aumenta.
- Vedere la dimostrazione del teorema del momento angolare ↩