In questo articolo proponiamo 14 esercizi svolti su sottospazi vettoriali. Prosieguo della raccolta Esercizi sugli spazi vettoriali – somma e intersezione, ha lo scopo di fornire ulteriore materiale per l’approfondimento di questa importante tematica dell’algebra lineare.
Gli esercizi sono accuratamente selezionati e completamente svolti: auguriamo a tutti una piacevole lettura.
Sommario
Leggi...
 dato e sui concetti di dipendenza e indipendenza lineare.
dato e sui concetti di dipendenza e indipendenza lineare.Autori e revisori
Leggi...
Revisori: Valerio Brunetti Luigi De Masi
Notazioni su sottospazi vettoriali
Leggi...









![\mathbb{R}_{k}[x]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2e3549bbf5f5b6bf6807d05b0266ed3b_l3.svg "Rendered by QuickLaTeX.com")


campo dei numeri reali;
campo dei numeri complessi;
insieme numeri naturali (incluso lo zero);
generico campo;
generico spazio vettoriale;
dimensione dello spazio vettoriale ;
vettore nullo in ;
vettore nullo dello spazio vettoriale in esame;
matrice identità di dimensione deducibile dal contesto;
sottospazio vettoriale di generato dai vettori  ,
, ,
, .
.
spazio vettoriale dei polinomi a coefficienti reali nella variabile  aventi grado al più
aventi grado al più  ;
;
spazio vettoriale della matrici quadrate  a coefficienti reali;
a coefficienti reali;
spazio vettoriale della matrici quadrate  a coefficienti reali.
a coefficienti reali.
Premessa teorica su sottospazi vettoriali
Leggi...
uno spazio vettoriale a coefficienti nel campo e sia  un numero naturale.
un numero naturale.
- Un sottoinsieme
 è detto sottospazio vettoriale di se esso è uno spazio vettoriale a sua volta, ovvero se per ogni coppia di scalari
è detto sottospazio vettoriale di se esso è uno spazio vettoriale a sua volta, ovvero se per ogni coppia di scalari  ,
,  e per ogni coppia di vettori
e per ogni coppia di vettori  ,
,  si ha
si ha
![\[\alpha v+\beta w\in S.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-723bcdc1e9a1d8b1cd34d062d2e2cdbb_l3.svg "Rendered by QuickLaTeX.com")
Osserviamo in particolare, scegliendo
 , che
, che  deve contenere il vettore nullo di .
deve contenere il vettore nullo di . - Dati
 scalari
scalari  ed vettori
ed vettori  , il vettore
, il vettore  dato da
dato da
![\[u=\alpha_1 v_1+\cdots\alpha_n v_n\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-566fab3addd2531acb8d68c826bc4c45_l3.svg "Rendered by QuickLaTeX.com")
è detto combinazione lineare degli
vettori assegnati con coefficienti . - Un sottoinsieme è detto linearmente dipendente se esistono vettori
 ed scalari non tutti nulli tali che
ed scalari non tutti nulli tali che![\[\alpha_1 v_1+\cdots\alpha_n v_n=\bf 0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8786a7a84ff1d02afa0dc74c6f690b85_l3.svg "Rendered by QuickLaTeX.com")
Altrimenti è detto linearmente indipendente.
- Dato un sottoinsieme , chiamiamo
![\[\mathcal{L}(S)\subseteq V\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-6c800b02cf1e55e1c007eded6163beac_l3.svg "Rendered by QuickLaTeX.com")
l’insieme di tutte le combinazioni lineari di un numero finito di elementi di
. Esso è un sottospazio vettoriale di detto sottospazio generato da . Se è un insieme finito di vettori  , scriviamo
, scriviamo ![\[\mathcal{L}(v_1,\cdots,v_n)\subseteq V.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-5dd81d4c2cbd854f90c787dc7cb076d9_l3.svg "Rendered by QuickLaTeX.com") è detto insieme dei generatori del sottospazio in questione.
è detto insieme dei generatori del sottospazio in questione. - Chiamiamo base di uno spazio vettoriale un insieme
 di generatori linearmente indipendenti di . Se la base ha cardinalità finita
di generatori linearmente indipendenti di . Se la base ha cardinalità finita  chiamiamo dimensione dello spazio la cardinalità di
chiamiamo dimensione dello spazio la cardinalità di  , ovvero
, ovvero
![\[\operatorname{dim}V=m.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-38ae391878ed488ffe157d4045eb24b6_l3.svg "Rendered by QuickLaTeX.com")
Ricordiamo, ad esempio, che l’insieme dei polinomi a coefficienti reali di grado minore o uguale a è uno spazio vettoriale. Più esplicitamente tale spazio può essere descritto come:
![\[\mathbb{R}_k[x]:=\{a_0+a_1x+\cdots+a_{n-1}x^{k-1}+a_kx^k \colon a_0,a_1,\dots,a_k \in \mathbb{R}\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1fe3909fa910597df4a3fa6cabf31724_l3.svg "Rendered by QuickLaTeX.com")
Osserviamo inoltre che, per ogni numero naturale  ,
, ![\mathbb{R}_k[x]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-98556da287875fc72e330901400469d4_l3.svg "Rendered by QuickLaTeX.com") è uno spazio vettoriale su di dimensione
è uno spazio vettoriale su di dimensione  , infatti una possibile base per questo spazio è data dall’insieme di vettori
, infatti una possibile base per questo spazio è data dall’insieme di vettori
![\[\mathcal{B}=\{1,x,\dots,x^{k-1},x^k\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-787fad716025347989088fc65a09c200_l3.svg "Rendered by QuickLaTeX.com")
Testi degli esercizi su sottospazi vettoriali
 Quali dei seguenti sottoinsiemi di
Quali dei seguenti sottoinsiemi di  sono anche sottospazi vettoriali? Motivare la risposta.
sono anche sottospazi vettoriali? Motivare la risposta.
-
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 .
.
Svolgimento punto 1.
 non è un sottospazio, in quanto la terza coordinata è forzata ad essere uguale a
non è un sottospazio, in quanto la terza coordinata è forzata ad essere uguale a  e ciò ha come conseguenza che il vettore nullo non può appartenere al suddetto insieme.
e ciò ha come conseguenza che il vettore nullo non può appartenere al suddetto insieme.Svolgimento punto 2.
 è un sottospazio di ; infatti prendiamo due elementi generici
è un sottospazio di ; infatti prendiamo due elementi generici  e
e  appartenenti a tale insieme e mostriamo che una loro combinazione lineare è ancora un elemento di esso. Scegliamo dunque due numeri reali arbitrari e
appartenenti a tale insieme e mostriamo che una loro combinazione lineare è ancora un elemento di esso. Scegliamo dunque due numeri reali arbitrari e  e osserviamo che
e osserviamo che  appartiene ancora all’insieme.
appartiene ancora all’insieme.Svolgimento punto 3.
appartiene a  se e solo se la prima e la seconda componente sono uguali; mostriamo che tale condizione definisce un sottospazio di .
Dati due scalari arbitrari
se e solo se la prima e la seconda componente sono uguali; mostriamo che tale condizione definisce un sottospazio di .
Dati due scalari arbitrari  , una generica combinazione lineare di elementi di è pari a
, una generica combinazione lineare di elementi di è pari a
![\[\alpha(x,x,y)+\beta(w,w,z)=(\alpha x + \beta w,\alpha x + \beta w,\alpha y + \beta z).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-95489768e259c5308daa651ebb7f8087_l3.svg "Rendered by QuickLaTeX.com")
Osserviamo che in questo elemento risultante le prime due componenti sono ancora uguali: è quindi un sottospazio.
Svolgimento punto 4.
 di è un sottospazio. Dati due scalari arbitrari
di è un sottospazio. Dati due scalari arbitrari  , una generica combinazione lineare di elementi di è pari a
, una generica combinazione lineare di elementi di è pari a
![\[\alpha(x,y,z) +\beta(u,v,w) =(\alpha x+\beta u,\alpha y+\beta v,\alpha z+\beta w).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f87d9bc7173033be1b020212764011d8_l3.svg "Rendered by QuickLaTeX.com")
Proviamo che tale vettore soddisfa ancora la condizione che definisce :
![\[(\alpha x+\beta u)+(\alpha y+ \beta v)=\alpha(x+y)+\beta(u+v)=\alpha z+\beta w,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f785a2c7a96666709c829b6edfa9240b_l3.svg "Rendered by QuickLaTeX.com")
come volevasi dimostrare.
La seconda uguaglianza segue dall’assunto che i due elementi di scelti soddisfano la condizione che definisce .
Svolgimento punto 5.
 non è un sottospazio: il vettore
non è un sottospazio: il vettore  appartiene ad esso ma
appartiene ad esso ma  no.
no.Osservazione.
 Mostrare che l’insieme delle soluzioni di un sistema lineare omogeneo di
Mostrare che l’insieme delle soluzioni di un sistema lineare omogeneo di  equazioni in incognite è un sottospazio vettoriale di
equazioni in incognite è un sottospazio vettoriale di  .
.
Svolgimento.
indeterminate  ed equazioni, un sistema lineare omogeneo
ed equazioni, un sistema lineare omogeneo  si presenterà, a meno di ordinare addendi ed equazioni, nella seguente forma:
si presenterà, a meno di ordinare addendi ed equazioni, nella seguente forma:
![\[\Sigma=\begin{cases} \text{ } a_{1,1}x_{1}+a_{1,2}x_{1}+\cdots+a_{1,n}x_{n}=0 \\ \text{ } a_{2,1}x_{1}+a_{2,2}x_{2}+\cdots+a_{2,n}x_{n}=0 \\ \text{ }\text{ }\text{ }\text{ }\qquad \qquad\qquad \vdots\\ a_{m,1}x_{1}+a_{m,2}x_{2}+\cdots+a_{m,n}x_{n}=0. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-5d4b1eac7c622dc991159caa97241c27_l3.svg "Rendered by QuickLaTeX.com")
Scopo di questo esercizio è mostrare che l’insieme
![\[S=\{(x_1,x_2,\cdots,x_n) \colon (x_1,x_2,\cdots,x_n)\text{ è soluzione di } \Sigma \}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-57c64e4ecef566baea02bb305d13c8ca_l3.svg "Rendered by QuickLaTeX.com")
è un sottospazio vettoriale di .
Si prendano due soluzioni arbitrarie di ,  ,
, , si scelgano due scalari e si consideri la combinazione lineare
, si scelgano due scalari e si consideri la combinazione lineare
![\[\alpha(x_1,x_2,\cdots,x_n)+\beta(y_1,y_2,\cdots,y_n).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9204ec809b9d519b0c3ac4806438b463_l3.svg "Rendered by QuickLaTeX.com")
Mostriamo che essa è ancora una soluzione di .
Per farlo scegliamo una qualsiasi equazione del sistema e verifichiamo che la nostra combinazione lineare è soluzione di essa (per l’arbitrarietà dell’equazione deduciamo dunque che la combinazione lineare è soluzione di tutte le equazioni, simultaneamente); scegliamo dunque l’equazione  -esima, con
-esima, con  generico, e valutiamola nella combinazione lineare della soluzione. Otteniamo:
generico, e valutiamola nella combinazione lineare della soluzione. Otteniamo:
![\[\begin{aligned} &a_{i,1}(\alpha x_1 + \beta y_1)+a_{i,2}(\alpha x_2 + \beta y_2)+\cdots + a_{i,n}(\alpha x_n + \beta y_n)=\\ \qquad &=\alpha (a_{i,1}x_1+a_{i,2}x_2 +\cdots + a_{i,n} x_n)+ \beta (a_{i,1}y_1+a_{i,2}y_2 +\cdots + a_{i,n} y_n)\\ \qquad & = 0. \end{aligned}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-42af2f692ed7a6d6be962642a41d62bd_l3.svg "Rendered by QuickLaTeX.com")
L’ultima identità segue dal fatto che e  sono soluzioni di .
sono soluzioni di .
Quali dei seguenti sottoinsiemi di  sono anche sottospazi vettoriali? Motivare la risposta.
sono anche sottospazi vettoriali? Motivare la risposta.
-
 ;
; -
 ;
; -
 ;
; -
 .
.
Svolgimento punto 1.
è l’insieme delle soluzioni del sistema lineare omogeneo descritto dalla singola equazione
![\[c=0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7781f2e95a334168c52dca49969078e0_l3.svg "Rendered by QuickLaTeX.com")
In virtù di quando mostrato nell’esercizio 2, è quindi un sottospazio di .
Svolgimento punto 2.
 :
:
![\[A^{T}=\begin{pmatrix} a & c \\ d & d \end{pmatrix}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-0d9195e184847ee869da87d706979aed_l3.svg "Rendered by QuickLaTeX.com")
Quindi l’insieme delle matrici uguali alla propria trasposta può essere espresso nella maniera seguente:
![\[V_2=\left\{\begin{pmatrix} a & c \\ d & d \end{pmatrix} \in M_2(\mathbb{R}) \colon \text{ } b=c \right\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8c4da95dabab8654a173c5ec264e5604_l3.svg "Rendered by QuickLaTeX.com")
Anche questa volta notiamo che l’equazione che definisce è lineare e omogenea, possiamo dunque affermare che è un sottospazio.
Svolgimento punto 3.
non è un sottospazio. La matrice identica
![\[\operatorname{Id}=\begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ba7499995dc275de8d738bc3f011f42b_l3.svg "Rendered by QuickLaTeX.com")
appartiene ovviamente a questo insieme ma  no; infatti
no; infatti
![\[(2\cdot \operatorname{Id}) ^{2}=4 \cdot \operatorname{Id} \ne 2\cdot \operatorname{Id}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9fe9393b0ace0f1c9c4b3831bb2bb5f9_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento punto 4.
è l’insieme delle soluzioni del sistema lineare omogeneo descritto dalla singola equazione
![\[a-b+c-d=0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d1a4b7916bdb3221cc9cfc2eda4b225c_l3.svg "Rendered by QuickLaTeX.com")
In virtù di quanto mostrato nell’esercizio 2, è quindi un sottospazio di .
Quali dei seguenti sottoinsiemi sono sottospazi vettoriali di ![\mathbb{R}_3[x]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1afb29f5cef76fa112901d8e275a328c_l3.svg "Rendered by QuickLaTeX.com") ? Motivare la
? Motivare larisposta.
-
![A=\{p(x)\in \mathbb{R}_3[x] \colon p(2) = 0\}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8bf31498c374aa167c72f84b88600c4b_l3.svg "Rendered by QuickLaTeX.com") ;
; -
![B=\{p(x)\in \mathbb{R}_3[x] \colon p(2) = 1\}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-48596776f1a943fe6968148c70785d21_l3.svg "Rendered by QuickLaTeX.com") ;
; -
![C=\{a_1x + a_2x^2 \in \mathbb{R}_3[x] \}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e0eb182ea9fa71d66693f175ceb6e0d9_l3.svg "Rendered by QuickLaTeX.com") .
.
Svolgimento punto 1.
 due polinomi di grado minore o uguale a
due polinomi di grado minore o uguale a  tali che
tali che  . Si scelgano
. Si scelgano  e si formi il polinomio
e si formi il polinomio  ; se valutiamo questo polinomio in
; se valutiamo questo polinomio in  otteniamo ancora
otteniamo ancora  , infatti
, infatti
![\[t(2)=\alpha r(2)+ \beta q(2)=\alpha\cdot 0 + \beta \cdot 0 =0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-bb03f2e17645c08ec5038a41e0f08492_l3.svg "Rendered by QuickLaTeX.com")
Ciò mostra che  è un sottospazio di .
è un sottospazio di .
Svolgimento punto 2.
 non è un sottospazio: infatti non contiene il polinomio nullo, che invece appartiene a un qualsiasi sottospazio.
non è un sottospazio: infatti non contiene il polinomio nullo, che invece appartiene a un qualsiasi sottospazio.Svolgimento punto 3.
 ,
,  e, dati due coefficieinti reali , consideriamone un combinazione lineare
e, dati due coefficieinti reali , consideriamone un combinazione lineare
![\[\alpha r + \beta q=\alpha(r_1 x+r_2 x^2)+\beta(q_1 x+q_2 x^2)=(\alpha r_1+\beta q_1)x+(\alpha r_2+\beta q_2)x^2.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-560ffb04303464e048237835e8cc39cc_l3.svg "Rendered by QuickLaTeX.com")
Osserviamo che il polinomio così ottenuto è di secondo grado e il suo termine noto è ancora nullo: concludiamo che anche  è sottospazio.
è sottospazio.
Sia  un sottospazio vettoriale di su . Mostrare che
un sottospazio vettoriale di su . Mostrare che
- se
 con
con  , allora
, allora  ;
; - se
 , allora
, allora  .
.
Svolgimento punto 1.
si può moltiplicare il vettore  per
per  . Essendo un sottospazio, il vettore risultante apparterrà ancora a ; dunque,
. Essendo un sottospazio, il vettore risultante apparterrà ancora a ; dunque,  appartiene a .
appartiene a .Svolgimento punto 2.
 appartengono a , dovrà appartenere a anche il vettore
appartengono a , dovrà appartenere a anche il vettore  . Determinare se
. Determinare se  nei seguenti casi:
nei seguenti casi:-
 e
e  ,
,  ,
,  .
. - e
 , , .
, , . -
 e
e  ,
,  ,
, 
- e
 ,
,  ,
,
Metodo risoluzione generale esercizio.
 significa che esistono tali per cui
significa che esistono tali per cui  . Quindi, in generale, avremo come incognite e in un sistema lineare non omogeneo (le equazioni saranno tante quante la dimensione dello spazio e i termini noti le coordinate di ); apparterrà allo spazio generato dunque se e solo se il sistema che abbbiamo creato ammette soluzione.
Applichiamo questo ragionamento ai vari casi richiesti dalla traccia.
. Quindi, in generale, avremo come incognite e in un sistema lineare non omogeneo (le equazioni saranno tante quante la dimensione dello spazio e i termini noti le coordinate di ); apparterrà allo spazio generato dunque se e solo se il sistema che abbbiamo creato ammette soluzione.
Applichiamo questo ragionamento ai vari casi richiesti dalla traccia.Svolgimento punto 1.
, dobbiamo risolvere il seguente sistema:
![\[\begin{cases} 1=\alpha \\ -1= \alpha + \beta\\ 2= \alpha + 3\beta. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-db4356b506b435d5c735e7dbe30dcb76_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo la prima equazione nella seconda otteniamo  . Sostituendo tutto nella terza equazione otteniamo
. Sostituendo tutto nella terza equazione otteniamo  cioè
cioè  , deducendo che il sistema in questione non ha soluzione. Concludiamo che il vettore non è combinazione lineare dei vettori
, deducendo che il sistema in questione non ha soluzione. Concludiamo che il vettore non è combinazione lineare dei vettori  .
.
Svolgimento punto 2.
, dobbiamo risolvere il seguente sistema:
![\[\begin{cases} 3=\alpha \\ 1= \alpha + \beta\\ -3= \alpha + 3\beta. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-87ed73d7226441060145283d16961902_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo la prima equazione nella seconda otteniamo . Sostituendo tutto nella terza equazione otteniamo  cioè
cioè  , che non contraddice le altre equazioni. Concludiamo che
, che non contraddice le altre equazioni. Concludiamo che  e dunque appartiene al sottospazio generato da .
e dunque appartiene al sottospazio generato da .
Svolgimento punto 3.
, dobbiamo risolvere il seguente sistema:
![\[\begin{cases} 1=\alpha + 2\beta\\ 3= -\alpha + \beta\\ -1= 2\alpha + \beta \\ 1 = \alpha. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-c828675f10edee4b40c7965e5205f47e_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo la quarta equazione nella prima otteniamo  . Sostituendo nella seconda equazione si ottiene
. Sostituendo nella seconda equazione si ottiene  , cioè il sistema non ammette soluzione. Deduciamo che non appartiene allo spazio generato da .
, cioè il sistema non ammette soluzione. Deduciamo che non appartiene allo spazio generato da .
Svolgimento punto 4.
, dobbiamo risolvere il seguente sistema:
![\[\begin{cases} 1=\alpha + 2\beta\\ -4= -\alpha + \beta\\ 5= 2\alpha + \beta \\ 3 = \alpha. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-0970b908a18cde42a3476a8f4f46b27e_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo la quarta equazione nella prima otteniamo  . Sostituendo nella terza equazione si ottiene
. Sostituendo nella terza equazione si ottiene  e si verifica facilmente che anche la seconda equazione è soddisfatta. Deduciamo che appartiene allo spazio generato da e che
e si verifica facilmente che anche la seconda equazione è soddisfatta. Deduciamo che appartiene allo spazio generato da e che  .
.
Mostrare che un insieme di vettori  in uno spazio vettoriale è linearmente dipendente se e solo se uno dei
in uno spazio vettoriale è linearmente dipendente se e solo se uno dei  è combinazione lineare dei rimanenti vettori.
è combinazione lineare dei rimanenti vettori.
Svolgimento.
 sia linearmente dipendente. Abbiamo che esistono
sia linearmente dipendente. Abbiamo che esistono  non tutti nulli tali che
non tutti nulli tali che
![\[a_1v_1+a_2v_2+\cdots,+a_nv_n=\bf 0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b162aa58681748f9437bd7e9980f446b_l3.svg "Rendered by QuickLaTeX.com")
Sappiamo che esiste  tale per cui
tale per cui  ; sommando
; sommando  a entrambi i membri dell’equazione e dividendo per
a entrambi i membri dell’equazione e dividendo per  , si ottiene:
, si ottiene:
![\[v_i=\dfrac{1}{a_i}\big( (-a_1)v_1+\cdots+(-a_{i-1})v_{i-1}+(-a_{i+1})v_{i+1}+\cdots+ (-a_n)v_n \big),\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-85ff063d57b60d73093611e7d7214102_l3.svg "Rendered by QuickLaTeX.com")
cioè è combinazione lineare degli altri vettori.
Viceversa, se esiste  tale che è combinazione lineare degli altri vettori, assumendo senza perdita di generalità
tale che è combinazione lineare degli altri vettori, assumendo senza perdita di generalità  , abbiamo che
, abbiamo che
![\[v_1=a_2 v_2+\cdots+a_n v_n \iff a_2 v_2+\cdots+a_n v_n-v_1=\bf 0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7005b1434449f590d0652c080ae66def_l3.svg "Rendered by QuickLaTeX.com")
Abbiamo così ottenuto una combinazione lineare a coefficienti non tutti nulli (in particolare quello di è  ) degli vettori che dà il vettore nullo: l’insieme è dunque linearmente dipendente.
) degli vettori che dà il vettore nullo: l’insieme è dunque linearmente dipendente.
 Sia uno spazio vettoriale e un insieme non necessariamente finito di vettori di . Mostrare:
Sia uno spazio vettoriale e un insieme non necessariamente finito di vettori di . Mostrare:
- Se è linearmente indipendente, ogni sottoinsieme
 è linearmente indipendente;
è linearmente indipendente; - Se è linearmente dipendente, ogni sovrainsieme di , ossia ogni sottionsieme di tale che
 , è linearmente dipendente.
, è linearmente dipendente.
Svolgimento punto 1.
 e siano
e siano  . Poiché tali vettori appartengono anche ad , che è linearmente indipendente, l’unica combinazione lineare di essi pari al vettore nullo è quella con coefficienti scalari tutti nulli, dunque è linearmente indipendente.
. Poiché tali vettori appartengono anche ad , che è linearmente indipendente, l’unica combinazione lineare di essi pari al vettore nullo è quella con coefficienti scalari tutti nulli, dunque è linearmente indipendente.Svolgimento punto 2.
è dipendente, se  fosse indipendente lo sarebbe anche per quanto provato nel punto precedente. Dunque è linearmente dipendente. Determinare quali dei seguenti sottoinsiemi di
fosse indipendente lo sarebbe anche per quanto provato nel punto precedente. Dunque è linearmente dipendente. Determinare quali dei seguenti sottoinsiemi di  è costituito da vettori linearmente indipendenti:
è costituito da vettori linearmente indipendenti:
-
 ;
; -
 ;
; -
 ;
; -
 ;
; -
 .
.
Premessa teorica.
 è linearmente indipendente se e solo se l’equazione (nelle indeterminate
è linearmente indipendente se e solo se l’equazione (nelle indeterminate  )
)
![\[a_1v_1+ \dots + a_nv_n=\bf 0,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-24b3f9454d75f5ed4b03cd61c188cc40_l3.svg "Rendered by QuickLaTeX.com")
ha come unica soluzione  .
Nello svolgimento sarà più chiaro come queste equazioni si traducano naturalmente in termini di sistemi di equazioni lineari omogenee.
.
Nello svolgimento sarà più chiaro come queste equazioni si traducano naturalmente in termini di sistemi di equazioni lineari omogenee.
Svolgimento punto 1.
è necessariamente dipendente, poiché vettori in se  sono per forza dipendenti, in quanto una possibile base di è infatti data da vettori aventi tutte le componenti nulle eccetto l’-esima, per che va da ad . Osserviamo che, ad esempio, la seguente combinazione lineare dà il vettore nullo:
sono per forza dipendenti, in quanto una possibile base di è infatti data da vettori aventi tutte le componenti nulle eccetto l’-esima, per che va da ad . Osserviamo che, ad esempio, la seguente combinazione lineare dà il vettore nullo:
![\[(1,2,3,4)-(0,1,2,3)+(2,3,4,5)-(3,4,5,6)=\bf 0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-3bcf5c1791ea38a31eb41ea636815f8d_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento punto 2.
è dipendente, poiché la seguente combinazione lineare è pari al vettore nullo:
![\[(1,2,3,4)+(2,3,4,1)-(3,4,1,2)-(0,1,6,3)=\bf 0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-21171d76ba5e3021838c8aad88fd21f1_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento punto 3.
 ,
,  ,
,  ,
,  . Ponendo a zero una combinazione lineare dei vettori dell’insieme avente tali coefficienti, si ottiene il seguente sistema omogeneo:
. Ponendo a zero una combinazione lineare dei vettori dell’insieme avente tali coefficienti, si ottiene il seguente sistema omogeneo:
![\[\begin{cases} 0=a_1+2a_2+5a_3\\ 0=2a_1+3a_2+7a_3\\ 0= 3a_1+4a_2+9a_3\\ 0=4a_1+a_2-a_3. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4b1f9ebee21d1cfcef513e59b50140f9_l3.svg "Rendered by QuickLaTeX.com")
Dalla quarta equazione abbiamo che
![\[a_3=4a_1+a_2.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-785e27ee78c271adc2cb2a6c52b7876f_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo questa informazione nelle altre tre equazioni otteniamo tramite semplici manipolazioni algebriche
![\[\begin{cases} 0=21a_1+7a_2\\ 0=2a_1+3a_2+7a_3\\ 0=39a_1+13a_2\\ a_3=4a_1+a_2 \end{cases} \iff \begin{cases} 0=3a_1+a_2\\ 0=3a_1+a_2\\ 0=3a_1+a_2\\ a_3=4a_1+a_2. \end{cases} \iff \begin{cases} a_2=-3a_1\\ a_3=4a_1-3a_1=a_1 \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-26e4a0d1cab508c78c90bef6a5eace1a_l3.svg "Rendered by QuickLaTeX.com")
Abbiamo dunque una combinazione (infinite in realtà) che mostra la dipendenza dei tre vettori: se poniamo  allora per forza
allora per forza  . Questi coefficienti, nella combinazione linare, forniscono il vettore nullo, infatti:
. Questi coefficienti, nella combinazione linare, forniscono il vettore nullo, infatti:
![\[1\cdot \begin{pmatrix} 1 \\ 2 \\ 3 \\ 4 \end{pmatrix}+(-3)\cdot \begin{pmatrix} 2 \\ 3 \\ 4 \\ 1 \end{pmatrix}+1\cdot \begin{pmatrix} 5 \\ 7 \\ 9 \\ -1 \end{pmatrix}= \begin{pmatrix} 0 \\ 0 \\ 0 \\ 0 \end{pmatrix},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-c530fa012a6dbf56c3d2ec029e97c435_l3.svg "Rendered by QuickLaTeX.com")
dunque i vettori in questione sono linearmente dipendenti.
Svolgimento punto 4.
![\[\begin{cases} 0=a_1+2a_2+a_3\\ 0=2a_1+3a_2+a_3\\ 0= 3a_1+4a_2+a_3\\ 0=4a_1+a_2+a_3 \end{cases}\iff \begin{cases} a_2=-a_1\\ 0=2a_1+3a_2+a_3\\ 0= 3a_1+4a_2+a_3\\ 0=4a_1+a_2+a_3. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-39fced3eb3f3e62d465e18e9ab221604_l3.svg "Rendered by QuickLaTeX.com")
Dove abbiamo sottratto alla prima equazione la seconda e ottenuto  , cioè
, cioè  . Sostituiamo quindi la nuova prima equazione nella seconda e otteniamo:
. Sostituiamo quindi la nuova prima equazione nella seconda e otteniamo:
![\[\begin{cases} a_2=-a_1\\ a_1=a_3\\ 0= 3a_1+4a_2+a_3\\ 0=4a_1+a_2+a_3. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-6d7724b12d2c72ffb02b5e0fea6e54cb_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo ancora una volta le due informazioni nella quarta equazione otteniamo
![\[\begin{cases} a_2=-a_1\\ a_1=a_3\\ 0= 3a_1+4a_2+a_3\\ a_1=0. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8d74469647e406e036716d680f4e6811_l3.svg "Rendered by QuickLaTeX.com")
Ma se  allora sono forzate ad essere nulle anche le indeterminate e . Da ciò deduciamo che tali coefficienti devono essere tutti nulli e i vettori in questione sono linearmente indipendenti.
allora sono forzate ad essere nulle anche le indeterminate e . Da ciò deduciamo che tali coefficienti devono essere tutti nulli e i vettori in questione sono linearmente indipendenti.
Svolgimento punto 5.
 sono, dall’esercizio
sono, dall’esercizio ![\[(2,4,6,8)=\dfrac{2}{3}(3,6,9,12).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b1e10ecb40c74651dc2c58cfd2ed43b3_l3.svg "Rendered by QuickLaTeX.com") Per quali valori di
Per quali valori di  i vettori
i vettori  ,
,  ,
,  di risultano linearmente dipendenti?
di risultano linearmente dipendenti?
Svolgimento.
![\[a_1v_1+a_2v_2+a_3v_3=\bf 0\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-734d00e5d038d6047869ad4d908f03d5_l3.svg "Rendered by QuickLaTeX.com")
ammette una soluzione per i tre coefficienti ,, diversa da quella nulla.
Scrivendo in componenti i tre vettori, otteniamo quindi il sistema lineare omogeneo parametrico:
diversa da quella nulla.
Scrivendo in componenti i tre vettori, otteniamo quindi il sistema lineare omogeneo parametrico:
![\[\begin{cases} a_1+3a_2=0 \\ a_1+2a_2+a_3=0 \\ a_1+ka_2+ka_3=0, \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-319e5aeab0a3a93c346649ab0c6d0b9a_l3.svg "Rendered by QuickLaTeX.com")
da discutere al variare del parametro  .
Esplicitando nella prima equazione la prima variabile in funzione della seconda
.
Esplicitando nella prima equazione la prima variabile in funzione della seconda  e sostituendo tale equazione nella successiva si ottiene
e sostituendo tale equazione nella successiva si ottiene  . Sostituendo a loro volta tali identità nella terza equazione, si perviene al sistema equivalente:
. Sostituendo a loro volta tali identità nella terza equazione, si perviene al sistema equivalente:
![\[\begin{cases} a_1=-3a_2 \\ a_3=a_2 \\ (-3+2k)a_2=0. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2ce9241c727cb88044e3b20f5ec81c11_l3.svg "Rendered by QuickLaTeX.com")
Dalle prime due equazioni si deduce quindi che l’eventuale soluzione deve essere nelle forma
(1) 
- Se
 la terza equazione è sempre soddisfatta e quindi l’equazione (1) fornisce infinite soluzioni non nulle del sistema al variare di
la terza equazione è sempre soddisfatta e quindi l’equazione (1) fornisce infinite soluzioni non nulle del sistema al variare di  : i vettori in tal caso sono linearmente dipendenti.
: i vettori in tal caso sono linearmente dipendenti. - Se
 la terza equazione è soddisfatta se e solo se
la terza equazione è soddisfatta se e solo se  , l’equazione (1) implica in tal caso che il sistema ammette solo la soluzione nulla: i vettori sono quindi linearmente indipendenti.
, l’equazione (1) implica in tal caso che il sistema ammette solo la soluzione nulla: i vettori sono quindi linearmente indipendenti.
Scarica gli esercizi svolti
Ottieni il documento contenente 102 esercizi risolti, contenuti in 72 pagine ricche di dettagli, per migliorare la tua comprensione degli spazi vettoriali.
Esistono valori di per cui i vettori  ,
,  ,
,  di risultano linearmente dipendenti?
di risultano linearmente dipendenti?
Svolgimento.
 :
:
![\[\begin{cases} a_1+3a_2=0\\ a_1+2a_2+a_3=0\\ a_1+a_3=0\\ 3a_1+ka_2+ka_3=0. \end{cases}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-78aba38d5e5826c888c55afa251faae1_l3.svg "Rendered by QuickLaTeX.com")
Osserviamo che dalla terza equazione ricaviamo  , sostituendo nella seconda si ha
, sostituendo nella seconda si ha  , che implica . Sostituendo nella prima e nella terza equazione si ottiene
, che implica . Sostituendo nella prima e nella terza equazione si ottiene  . Deduciamo che in questo caso i tre vettori sono linearmente indipendenti per ogni valore di .
. Deduciamo che in questo caso i tre vettori sono linearmente indipendenti per ogni valore di .
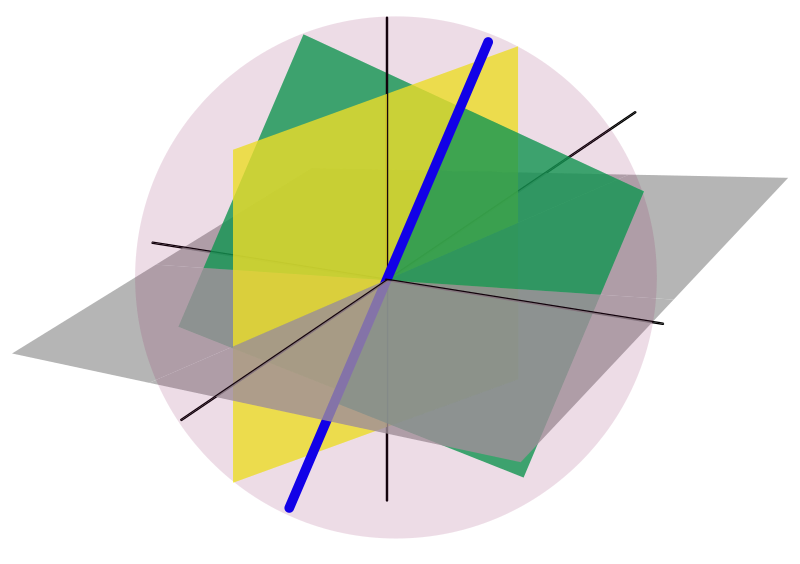
Siano
![\[S = \{(x, y, z) \in \mathbb{R}^3 \colon x + 5y - z = 0 \},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-91e9efbda2b91aeb1359a8a95a52707f_l3.svg "Rendered by QuickLaTeX.com")
![\[T = \{(x, y, z) \in \mathbb{R}^3 \colon 5x - y + z = 0 \}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-5ef198ed1594f656345295aa64bc5af8_l3.svg "Rendered by QuickLaTeX.com")
- Verificare che e
 sono sottospazi vettoriali di ;
sono sottospazi vettoriali di ; - trovare una base e la dimensione di e ;
- considerare l’insieme
 ; si tratta di un sottospazio vettoriale? In caso affermativo, trovarne una base e la dimensione.
; si tratta di un sottospazio vettoriale? In caso affermativo, trovarne una base e la dimensione.
Svolgimento punto 1.
e sono entrambi sottospazi per quanto provato nell’esercizio 2: sono infatti definiti come soluzioni di sistemi di equazioni lineari omogenee.Svolgimento punto 2.
, si vede che  se e solo se
se e solo se
(2) 
ossia se e solo se
(3) 
con  .
Da ciò si evince che è generato dai vettori
.
Da ciò si evince che è generato dai vettori  e
e  che, essendo indipendenti in quanto non proporzionali, ne costituiscono anche una base. Pertanto
che, essendo indipendenti in quanto non proporzionali, ne costituiscono anche una base. Pertanto  .
.
Analogamente, dalle equazioni che definiscono , si vede che  se e solo se
se e solo se
(4) 
ossia se e solo se
(5) 
con .
I due vettori  generano quindi e ne costituiscono inoltre una base, essendo linearmente indipendenti in quanto non proporzionali. Pertanto
generano quindi e ne costituiscono inoltre una base, essendo linearmente indipendenti in quanto non proporzionali. Pertanto  .
.
Svolgimento punto 3.
se e solo se soddisfa tutte le equazioni che definiscono e . Costituendo tali equazioni un sistema lineare omogeneo esse definiscono un sottospazio per quanto visto nel’esercizio 2. Pertanto  se e solo se
se e solo se
(6) 
ossia, uguagliando le due equazioni e ricavando , se e solo se
(7) 
Quindi se e solo se
(8) 
con  . Quindi il vettore
. Quindi il vettore  genera e ne costituisce una base, poiché non nullo e quindi linearmente indipendente. Pertanto
genera e ne costituisce una base, poiché non nullo e quindi linearmente indipendente. Pertanto  .
.
Si risponda alle stesse domande dell’esercizio precedente considerando i due sottoinsiemi di :
![\[S = \{(x, y, z, w) \in \mathbb{R}^4 \colon y - z = 0, x + 2z = 0\},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-44a5831bf1fcec72d2f576640686b0a0_l3.svg "Rendered by QuickLaTeX.com")
![\[T = \{(x, y, z, w) \in \mathbb{R}^4 \colon x - y + 2w = 0\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a0b22ec763378ede6d7af08792e4b3e2_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento punto 1.
e sono spazi vettoriali per quanto provato nel secondo esercizio: sono infatti definiti come soluzioni di sistemi di equazioni lineari omogenee.Svolgimento punto 2.
, si vede che  se e solo se
se e solo se
(9) 
ossia se e solo se
(10) 
con  .
Da ciò si evince che è generato dai vettori
.
Da ciò si evince che è generato dai vettori  e
e  che, essendo indipendenti in quanto non proporzionali, ne costituiscono anche una base. Pertanto .
che, essendo indipendenti in quanto non proporzionali, ne costituiscono anche una base. Pertanto .
Analogamente, dalle equazioni che definiscono , si vede che  se e solo se
se e solo se
(11) 
ossia se e solo se
(12) 
con  .
I tre vettori
.
I tre vettori  generano quindi e ne costituiscono inoltre una base, essendo un sistema linearmente indipendente: infatti osserviamo che il primo ed il terzo vettore sono indipendenti in quanto non proporzionali, inoltre essi hanno quarta componente nulla e quindi nessuna loro combinazione lineare può essere uguale al secondo vettore, che ha invece quarta componente pari ad . Pertanto
generano quindi e ne costituiscono inoltre una base, essendo un sistema linearmente indipendente: infatti osserviamo che il primo ed il terzo vettore sono indipendenti in quanto non proporzionali, inoltre essi hanno quarta componente nulla e quindi nessuna loro combinazione lineare può essere uguale al secondo vettore, che ha invece quarta componente pari ad . Pertanto  .
.
Svolgimento punto 3.
se e solo se soddisfa tutte le equazioni che definiscono e . Costituendo tali equazioni un sistema lineare omogeneo esse definiscono un sottospazio per quanto visto nel’esercizio 2. Pertanto  se e solo se
se e solo se
(13) 
ossia, sostituendo le prime due equazioni nella terza, se e solo se
(14) 
Quindi se e solo se
(15) 
con . Quindi il vettore  genera e ne costituisce una base, poiché non nullo e quindi linearmente indipendente. Pertanto .
genera e ne costituisce una base, poiché non nullo e quindi linearmente indipendente. Pertanto .
- Trovare una base per lo spazio delle matrici
 a coefficienti reali, e calcolarne la dimensione.
a coefficienti reali, e calcolarne la dimensione. - Trovare una base per lo spazio
 delle matrici
delle matrici  a coefficienti reali, e calcolarne la dimensione.
a coefficienti reali, e calcolarne la dimensione. - Mostrare che l’insieme
![\[T ^{\inf} _n (\mathbb{R})=\{A\in M_n(\mathbb{R})\colon a_{ij} = 0\quad\text{per}\quad j > i\}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7d8cac450e7f756fe9a72cdcf7cd1dc2_l3.svg "Rendered by QuickLaTeX.com")
delle matrici triangolari inferiori
a coefficienti reali è un sottospazio vettoriale di ; trovare una base e calcolare la dimensione di tale spazio.
Svolgimento punto 1.
 . Una matrice in questo spazio può essere dunque scritta come combinazione lineare
. Una matrice in questo spazio può essere dunque scritta come combinazione lineare
delle quattro matrici
![\[m_1=\begin{pmatrix} 1 & 0 \\ 0 & 0 \end{pmatrix},\quad m_2\begin{pmatrix} 0 & 1 \\ 0 & 0 \end{pmatrix},\quad m_3=\begin{pmatrix} 0 & 0 \\ 1 & 0 \end{pmatrix},\quad m_4=\begin{pmatrix} 0 & 0 \\ 0 & 1 \end{pmatrix}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2fcc04441da89b9b60d97d248e2c0560_l3.svg "Rendered by QuickLaTeX.com")
Ciò è evidente osservando che
![\[\begin{pmatrix} a & b \\ c & d \end{pmatrix}=am_1+bm_2+cm_3+dm_4.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e0a9f753633b2ec5a20d137eb7e2918a_l3.svg "Rendered by QuickLaTeX.com")
E’ facile verificare che l’insieme  è costituito da vettori linearmente indipendenti, concludendo che quest’ultimo costituisce una base per lo spazio , che ha quindi dimensione
è costituito da vettori linearmente indipendenti, concludendo che quest’ultimo costituisce una base per lo spazio , che ha quindi dimensione  . Infatti
. Infatti
![\[am_1+bm_2+cm_3+dm_4=\begin{pmatrix} a & b \\ c & d \end{pmatrix}=\begin{pmatrix} 0 & 0 \\ 0 & 0 \end{pmatrix} \iff a=b=c=d=0.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f93f2ead32e659ce333b7ec531e6f80d_l3.svg "Rendered by QuickLaTeX.com")
Svolgimento punto 2.
![\[M_n(\mathbb{R})=\{(a_{i,j})_{1\le i,j \le n} \colon a_{ij} \in \mathbb{R} \text{ }\forall 1\le i,j \le n\}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a2d9f95705f81d43e82551405c62a758_l3.svg "Rendered by QuickLaTeX.com")
Definiamo  come la matrice che ha componenti tutte nulle tranne la
come la matrice che ha componenti tutte nulle tranne la  (corrisponente alla -esima riga e
(corrisponente alla -esima riga e  -esima colonna), in cui ha valore .
-esima colonna), in cui ha valore .
Ad esempio, se osserviamo il punto precedente nel caso  , con questa notazione abbiamo
, con questa notazione abbiamo  ,
,  ,
,  ,
,  .
.
Dunque, data  , si osserva che
, si osserva che
![\[A=\sum_{i,j=1}^{n}a_{i,j}e^{i,j},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-07c161d3e09b8a513ba214319619920a_l3.svg "Rendered by QuickLaTeX.com")
cioè che ogni matrice è combinazione lineare degli e che l’insieme  costituisce una base per , essendo un insieme di generatori di linearmente indipendenti, come può essere provato analogamente a come fatto nel primo punto, in cui lo si è mostrato nel caso in cui . La dimensione dello spazio si ha quindi contando il numero di tali vettori di base che, al variare di , risulta pari a
costituisce una base per , essendo un insieme di generatori di linearmente indipendenti, come può essere provato analogamente a come fatto nel primo punto, in cui lo si è mostrato nel caso in cui . La dimensione dello spazio si ha quindi contando il numero di tali vettori di base che, al variare di , risulta pari a  .
.
Svolgimento punto 3.
 . Per aiutarci a visualizzare meglio il problema e a calcolare la dimensione di questo sottospazio notiamo che una matrice triangolare inferiore di dimensione si presenta nella seguente forma:
. Per aiutarci a visualizzare meglio il problema e a calcolare la dimensione di questo sottospazio notiamo che una matrice triangolare inferiore di dimensione si presenta nella seguente forma:
![\[\begin{pmatrix} a_{1,1} & 0 & \cdots & 0 & 0 \\ a_{2,1} & a_{2.2} & \cdots & 0 & 0 \\ \vdots & \vdots & \ddots & \vdots & \vdots \\ a_{n-1,1} & a_{n-1,2} & & a_{n-1,n-1} & 0 \\ a_{n,1} & a_{n,2} & \cdots & a_{n,n-1} & a_{n,n} \end{pmatrix}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9865edc462725c92c6563cd72489e1bb_l3.svg "Rendered by QuickLaTeX.com")
Notiamo che tale sottospazio vettoriale è generato dal sottoinsieme della base canonica fatto da matrici triangolari inferiori, aventi quindi su un solo elemento della diagonale principale o al di sotto di essa e zero altrove: il numero di tali matrici determina quindi la dimensione dello spazio ed è un insieme linearmente indipendente in quanto sottoinsieme di un insieme linearmente indipendente, come visto nell’esercizio 8. Per contarle, guardiamo quante componenti non necessariamente nulle ci sono per ogni colonna: nella prima colonna abbiamo componenti non nulle, nella seconda ne abbiamo  , nella terza
, nella terza  , fino all’-esima in cui ne abbiamo solo una.
, fino all’-esima in cui ne abbiamo solo una.
Deduciamo che il numero di vettori di base è
![\[1+2+3+4+\cdots+(n-1)+n=\dfrac{n(n+1)}{2}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-5851de722c444383e3864db161aec157_l3.svg "Rendered by QuickLaTeX.com")
Quest’ultima identità è la famosa formula di Gauss sui numeri triangolari, può essere provata in maniera diretta o per induzione su .
Diamo un accenno della dimostrazione per completezza: volendo calcolare la somma definita da
![\[S=1+2+3+ \cdots + n.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8455bd0d8647460e98c6cc85589e90e4_l3.svg "Rendered by QuickLaTeX.com")
Le sommiamo una sua copia in ordine invertito, cioè aggiungiamo
![\[S=n+(n-1)+\cdots+3+2+1.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f4eab724e35ac091e376573cd4174eb1_l3.svg "Rendered by QuickLaTeX.com")
Per ogni addendo così ordinato abbiamo
![\[2S=(1+n)+(2+(n-1))+(3+(n-2))+\cdots+((n-1)+2)+(n+1).\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1cdea4528a923d513c41af0cb54872bf_l3.svg "Rendered by QuickLaTeX.com")
Notare che in questo accorpamento gli addendi sono e che ogni addendo vale esattamente  . Dunque abbiamo
. Dunque abbiamo
![\[2S=n(n+1),\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-286b2c389d8acdf31bebfe4400d0d464_l3.svg "Rendered by QuickLaTeX.com")
che ci porta al risultato finale
![\[\dim T ^{\inf} _n (\mathbb{R})= S=\dfrac{n(n+1)}{2}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f238e2737a0df3a4b0b9bcb887d552e5_l3.svg "Rendered by QuickLaTeX.com")
Riferimenti bibliografici
[1]. Abate, M., Geometria, McGraw-Hill (1996).
Ulteriori esercizi di geometria
In questa sezione vengono raccolti molti altri esercizi che coprono tutti gli argomenti di geometria proposti all’interno del sito con lo scopo di offrire al lettore la possibilità di approfondire e rinforzare le proprie competenze inerenti a tali argomenti.
Algebra lineare.
Geometria analitica.
Geometria differenziale.
Risorse didattiche aggiuntive per approfondire la matematica
Leggi...