 . Dato il sistema in figura dove
. Dato il sistema in figura dove
![\[A(s)=\dfrac{1}{1+s},\quad R(s)=\dfrac{k}{s}\quad \text{e}\quad P(s)=\dfrac{\text{0,1}}{100s+1}.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8cc52e9c2d4ab8cbb26311ad324fc8a2_l3.svg "Rendered by QuickLaTeX.com")
Si richiede di determinare la costante  del regolatore affinché il sistema retroazionato sia asintoticamente stabile.
del regolatore affinché il sistema retroazionato sia asintoticamente stabile.

Figura 1: sistema retroazionato.
Svolgimento.
Per la soluzione del problema ci si avvale del criterio di Bode. In accordo al quale se la funzione ad anello aperto non ha poli a parte reale è positiva ed è propria il sistema retroazionato è asintoticamente stabile se il margine di fase è maggiore di zero. Nel caso in esame la funzione ad anello aperto è
![\[ L(s)=\frac{\text{0,1}k}{s(100s+1)}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-c185543a73de7a5b0466dd37928ad514_l3.svg "Rendered by QuickLaTeX.com")
La funzione  rispetta le condizioni per poter applicare il criterio di Bode. L’andamento della fase non risente del valore di ; per valori crescenti di , tuttavia, la pulsazione critica si sposta verso destra e associa una fase più piccola, allontanando il sistema dalla stabilità. La pulsazione limite è quella che associa una fase di
rispetta le condizioni per poter applicare il criterio di Bode. L’andamento della fase non risente del valore di ; per valori crescenti di , tuttavia, la pulsazione critica si sposta verso destra e associa una fase più piccola, allontanando il sistema dalla stabilità. La pulsazione limite è quella che associa una fase di  .
.
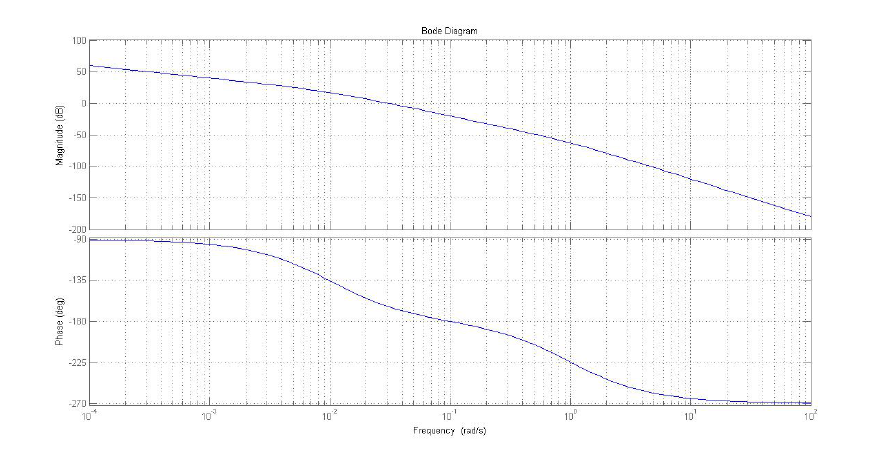
Figura 2: diagramma di Bode della funzione ad anello aperto.
Osservando il diagramma di Bode, è evidente che la pulsazione critica alla quale la fase diventa pari a è  . Per determinare il massimo valore di per il quale il sistema rimane asintoticamente stabile secondo il criterio di Bode, si impone che il modulo della funzione ad anello aperto valutato alla pulsazione
. Per determinare il massimo valore di per il quale il sistema rimane asintoticamente stabile secondo il criterio di Bode, si impone che il modulo della funzione ad anello aperto valutato alla pulsazione  sia uguale a uno:
sia uguale a uno:
![\[ \left\vert L(\text{0,1}j)\right\vert = 1. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-dce35acee3b17b07e7fe343d7c7dc701_l3.svg "Rendered by QuickLaTeX.com")
Sostituendo l’espressione di e valutando per  , otteniamo:
, otteniamo:
![\[ \frac{\left\vert \overline{k}\right\vert}{\left\vert \text{0,1}j\right\vert \left\vert 1+100\cdot\text{0,1}j\right\vert \left\vert 1+\text{0,1}j\right\vert} = 1 \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-71fece1f89474a97361f6ee311d86dc7_l3.svg "Rendered by QuickLaTeX.com")
e
![\[ \overline{k} = \sqrt{1 + 10^2} = \sqrt{1 + 10^{-2}} \approx 10. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7c5eeda5630352adee31c49c32d03169_l3.svg "Rendered by QuickLaTeX.com")
Pertanto, il sistema retroazionato rimane asintoticamente stabile per valori di inferiori a  . Il valore di
. Il valore di  può essere interpretato anche come il margine di guadagno della funzione. Per definizione:
può essere interpretato anche come il margine di guadagno della funzione. Per definizione:
![\[ k_m = \frac{1}{\left\vert L(j\omega_\pi)\right\vert} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-f71795cc92363ceae7902c3a47c69099_l3.svg "Rendered by QuickLaTeX.com")
dove  rappresenta la pulsazione alla quale la fase diventa.
rappresenta la pulsazione alla quale la fase diventa.
 . Si consideri il sistema in figura 3, con le seguenti funzioni di trasferimento:
. Si consideri il sistema in figura 3, con le seguenti funzioni di trasferimento:
![\[ A(s) = e^{-\tau s} \quad \text{con $\tau > 0$}, \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-dd12b6d6d075d9a67e7534ce34f06819_l3.svg "Rendered by QuickLaTeX.com")
![\[ R(s) = \frac{1}{s}, \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-445c58cf53277b8328d7f0052ab53610_l3.svg "Rendered by QuickLaTeX.com")
![\[ P(s) = \frac{\text{0,1}}{1+100s}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-1f5c908d7bd8259d0fab00d0626ad769_l3.svg "Rendered by QuickLaTeX.com")
Si richiede di determinare per quali valori di  il sistema risulta asintoticamente stabile.
il sistema risulta asintoticamente stabile.
Figura 3: sistema retroazionato.
Svolgimento.
![\[L(s)=R\cdot A\cdot P.\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-73e0a7c19572202e835bed9a193de10f_l3.svg "Rendered by QuickLaTeX.com")
Di seguito, nella figura che segue, rappresentiamo il diagramma di Bode della funzione di anello senza ritardo di tempo.
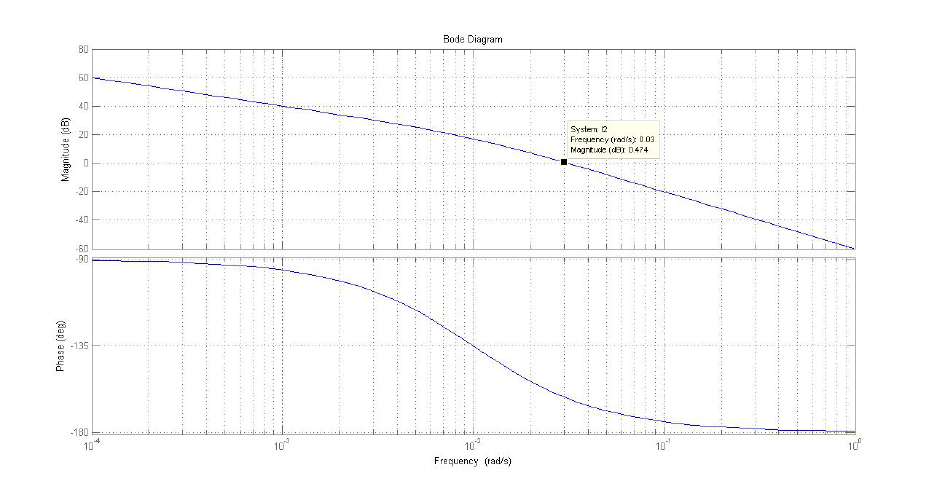
Figura 4: diagramma di Bode della funzione ad anello aperto.
La pulsazione critica alla quale il modulo del guadagno diventa unitario non è influenzata dalla presenza del ritardo di tempo. Possiamo calcolarla imponendo che il modulo della funzione di anello sia uguale a uno:
![\[ \left\vert L(j\omega_c)\right\vert = 1. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-829251dba3717559fa284185d5b57d76_l3.svg "Rendered by QuickLaTeX.com")
Da ciò otteniamo:
![\[ \left\vert L(j\omega_c)\right\vert = \frac{\text{0,1}}{\left\vert j\omega_c\right\vert}\cdot \frac{1}{\left\vert 1+100j\omega_c\right\vert} = 1 \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-5acb7849cdb1e44c753a02470b9b0616_l3.svg "Rendered by QuickLaTeX.com")
ovvero
![\[ 0.1 = \omega_c\sqrt{1+100\omega_c} \Rightarrow \text{0,01} = \omega_c^2\left(1+100\omega_c\right) \Rightarrow 10^4\omega_c^4+\omega_c^2-10^{-2} = 0 \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9f29196bd98e5cc18d0fb862cc9a1adc_l3.svg "Rendered by QuickLaTeX.com")
che conduce a
![\[ \omega_{c_{\text{1,2}}} = \frac{-1+\sqrt{401}}{2}\cdot 10^{-4} \approx 9\cdot 10^{-4}\,\text{rad$\cdot$s$^{-1}$}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-08077a323fc3f67a56174cb94ec8fcbc_l3.svg "Rendered by QuickLaTeX.com")
Scegliendo la soluzione positiva, otteniamo
![\[ \omega_{c_{1}} = \omega_{c} \approx 9\cdot 10^{-4}\,\text{rad$\cdot$s$^{-1}$} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e64a1e3dac7062a1299f82c1cb50b80d_l3.svg "Rendered by QuickLaTeX.com")
come evidenziato nella figura precedente. La fase della funzione di anello completa del ritardo di fase e valutata alla pulsazione è:
![\[ \angle L\left(j\omega_c\right) = -90^\circ - \arctan\left(100\omega_c\right) - \tau \cdot \omega_c \cdot \frac{180^\circ}{\pi} = -90^\circ - \text{71,56}^\circ - \tau \cdot \frac{\text{0,03}\cdot 180^\circ}{\pi} = -\text{161,56} - \text{1,71}\tau. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-088ab420db6cdf0ff5e3afbbf1b7699c_l3.svg "Rendered by QuickLaTeX.com")
Quindi il margine di fase è dato da:
![\[ \phi_m = 180^\circ - \left\vert \angle L\left(j\omega_c\right)\right\vert = \text{18,44}^\circ - \text{1,71}^\circ\tau. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-5e81593673b4f240a775aadbee14239d_l3.svg "Rendered by QuickLaTeX.com")
Imponendo che il margine di fase sia maggiore di zero, otteniamo che  , il che rappresenta il ritardo di tempo oltre il quale il sistema retroazionato diventa instabile.
, il che rappresenta il ritardo di tempo oltre il quale il sistema retroazionato diventa instabile.
 . Data la funzione di trasferimento
. Data la funzione di trasferimento
![\[W(s)=\dfrac{4\left(1+s\right)^2}{s\left(1-s\right)^2},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-443a86c5669d1da18b4b59d1e8c09785_l3.svg "Rendered by QuickLaTeX.com")
si richiede di trovare il margine di guadagno.
Svolgimento.
Il margine di guadagno rappresenta il massimo guadagno che può essere introdotto da un sistema, come per esempio un regolatore, in serie al processo tale che non rende il sistema complessivo chiuso in retroazione unitaria instabile. Il guadagno può essere valutato in tre modi:
- analiticamente, come
![\[K_M=\dfrac{1}{\left \vert W\left(j\omega\right)\right \vert }\bigg\vert_{\omega=\omega_c},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-08aa23232f590016bf4af8f93b9a8bf7_l3.svg "Rendered by QuickLaTeX.com")
dove
 è il margine di guadagno e è la pulsazione per la quale vale
è il margine di guadagno e è la pulsazione per la quale vale  ;
; - graficamente dal diagramma di Bode, come la distanza tra il diagramma dei moduli e l’asse a
 , valutata in corrispondenza della pulsazione per la quale di
, valutata in corrispondenza della pulsazione per la quale di  diventa uguale a
diventa uguale a  ;
; - graficamente dal diagramma di Nyquist come la distanza tra il punto
 e il punto di intersezione del digramma con l’asse reale.
e il punto di intersezione del digramma con l’asse reale.
Di seguito proporremo tutti e tre i metodi.
Svolgimento metodo 1.
La fase della funzione di trasferimento può essere scritta come
![\[\angle W(jw)=\angle 4 +2 \arctan \left(\omega\right)-\dfrac{\pi}{2}+2\arctan(\omega)=\pi,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-43b64a612c5710f1b0819202ecb63172_l3.svg "Rendered by QuickLaTeX.com")
da cui
![\[4\arctan\left(\omega\right)=\dfrac{3}{2}\pi,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-36eaceead4256e576c1a4fb76078934f_l3.svg "Rendered by QuickLaTeX.com")
ovvero
![\[\arctan\left(\omega\right)=\dfrac{3}{8}\pi,\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-2066fc83f52f013e134b9cc6abb778c8_l3.svg "Rendered by QuickLaTeX.com")
cioè
![\[\omega=\omega_c\sim \text{2,41 rad/s.}\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-dbc19910a8fd8e4d279b55fe65ad095c_l3.svg "Rendered by QuickLaTeX.com")
Abbiamo dunque
![\[\left \vert W(j\omega_c)\right \vert =\dfrac{4\left \vert 1+j(\text{2,41})\right \vert }{\left \vert \text{2,41}\right \vert\left \vert1-j(\text{2,41}) \right \vert }=\text{1,65},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d7160292129b743bb47edae029e6a7c4_l3.svg "Rendered by QuickLaTeX.com")
da cui
![\[K_M=\dfrac{1}{\text{1,65}}=\text{0,6},\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-720a3286f161a15d6b5c6e0e01a60960_l3.svg "Rendered by QuickLaTeX.com")
che può essere espresso in decibel come
![\[K_M\,\text{dB}=20\log_P{10}\left \vert \text{0,6}\right \vert\sim \text{-4,38} .\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8ef78309832c893a362fafb51c4fe0eb_l3.svg "Rendered by QuickLaTeX.com")
Il modulo di guadagno rappresenta il massimo guadagno che può avere un controllore posto in serie al processo .
Svolgimento metodo 2.
Riportiamo, di seguito, i grafici della fase e del modulo dell’esercizio 4 presente nella cartella “i diagrammi di Bode”.
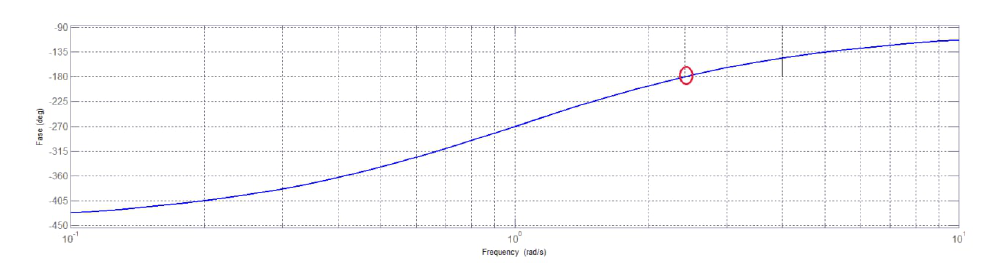
Figura 5: diagramma della fase – analisi del sistema.
Figura 6: diagramma del modulo – analisi del sistema.
Sul diagramma della fase si osserva che la fase assume il valore di  in corrispondenza della pulsazione di
in corrispondenza della pulsazione di  . Sul digramma del modulo la distanza tra il modulo a
. Sul digramma del modulo la distanza tra il modulo a  e l’asse , rappresenta il margine di guadagno della funzione anello chiuso, ovvero il massimo guadagno che può avere un regolataore posto in serie al processo da controllare.
e l’asse , rappresenta il margine di guadagno della funzione anello chiuso, ovvero il massimo guadagno che può avere un regolataore posto in serie al processo da controllare.
Svolgimento metodo 3.
Per valutare il margine di guadagno dal diagramma di Nyquist, si riporta, di seguito, il diagramma ottenuto dall’esercizio 1 presente dalla cartella “I diagrammi di Nyquist”.

Figura 7: rappresentazione grafica del modulo del sistema.
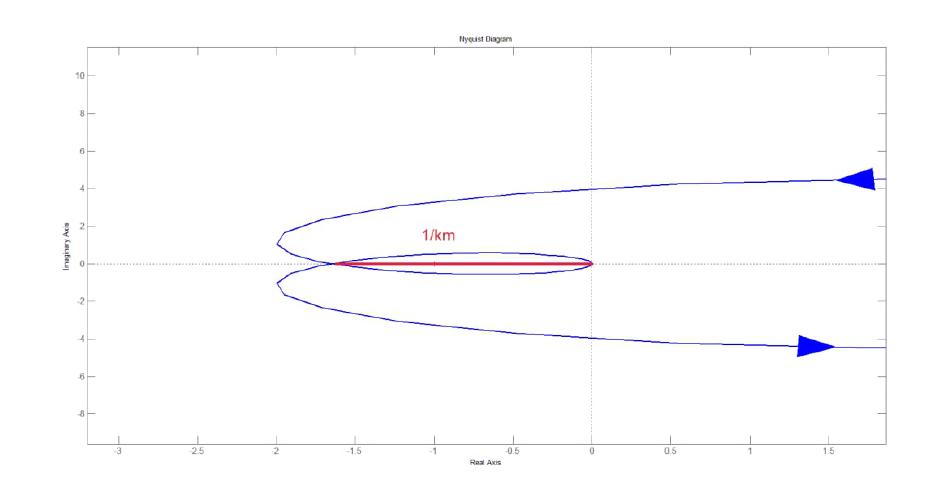
Figura 8: diagramma di Nyquist – caso 2.
Sul grafico del diagramma di Nyquist la distanza tra l’origine degli assi e il primo attraversamento con l’asse reale, rappresenta il rapporto  , come rappresentato nella figura di sopra, ovvero il reciproco del margine di guadagno. La distanza in oggetto vale
, come rappresentato nella figura di sopra, ovvero il reciproco del margine di guadagno. La distanza in oggetto vale  , il cui inverso vale
, il cui inverso vale  e rappresenta il margine di guadagno che è lo stesso valore ottenuto nei due metodi precedenti.
e rappresenta il margine di guadagno che è lo stesso valore ottenuto nei due metodi precedenti.
Tutte le cartelle di controlli automatici
Leggi...
- Analisi nel dominio di Laplace e del tempo di sistemi dinamici LTI a tempo continuo
- Analisi modale di sistemi dinamici LTI a tempo continuo
- Linearizzazione di sistemi dinamici
- Analisi della Stabilità dei Sistemi LTI
- Stabilità dell’equilibrio di sistemi dinamici non lineari
- Retroazione statica dallo stato
- Analisi nel dominio del tempo e della trasformata Zeta di sistemi dinamici LTI a tempo discreto
- Trasformata Zeta
- La risposta in frequenza
- Analisi modale di sistemi dinamici LTI a tempo discreto
- La carta di Nichols
- Proprietà della risposta allo scalino
- Schemi a blocchi e loro combinazioni
- I diagrammi di Bode
- I diagrammi di Nyquist
- Il progetto del controllore
- Il luogo delle radici
- Stabilità in condizioni perturbate: i margini
- I regolatori PID
- Le reti compensatrici
- Modellistica dei sistemi dinamici meccanici, elettrici
- Proprietà strutturali dei sistemi
- Sintesi del modello di stato ISU
- Sintesi dell’osservatore asintotico dello stato