 . Considerando la seguente funzione di trasferimento
. Considerando la seguente funzione di trasferimento
![\[ G(s) = \frac{2s^2 + s + 3}{s^3 + 3s^2 + 7s + 5} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8cab30535fe90cc3ce91c75bc8a201ff_l3.svg "Rendered by QuickLaTeX.com")
si richiede di determinarne una realizzazione minima.
Svolgimento.
Per iniziare, è necessario esprimere la funzione di trasferimento  in termini della formula canonica di riferimento:
in termini della formula canonica di riferimento:
![\[ G(s) = \frac{b_2s^2 + b_1s + b_0}{s^3 + a_2s^2 + a_1s + a_0}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-59549b167b5978b33a5586a0fd75055e_l3.svg "Rendered by QuickLaTeX.com")
Optando per realizzare il sistema secondo la forma canonica di osservabilità, le matrici corrispondenti sono definite come segue:
![\[ A = \begin{pmatrix} 0 & 0 & -a_0 \\ 1 & 0 & -a_1 \\ 0 & 1 & -a_2 \end{pmatrix} = \begin{pmatrix} 0 & 0 & -5 \\ 1 & 0 & -7 \\ 0 & 1 & -3 \end{pmatrix}, \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-7a6d8c74cba69f926fe20563ab7eba12_l3.svg "Rendered by QuickLaTeX.com")
![\[ B = \begin{pmatrix} b_0 \\ b_1 \\ b_2 \end{pmatrix} = \begin{pmatrix} 3 \\ 1 \\ 2 \end{pmatrix}, \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-8b25336de4b0e34aff122f166470dc2f_l3.svg "Rendered by QuickLaTeX.com")
e
![\[ C = \begin{pmatrix} c_0 & c_1 & c_2 \end{pmatrix} = \begin{pmatrix} 0 & 0 & 1 \end{pmatrix}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-360ba70566cef1b12f8d7e8fed9d23ad_l3.svg "Rendered by QuickLaTeX.com")
Con queste definizioni, la realizzazione fisica del circuito è quindi determinata.
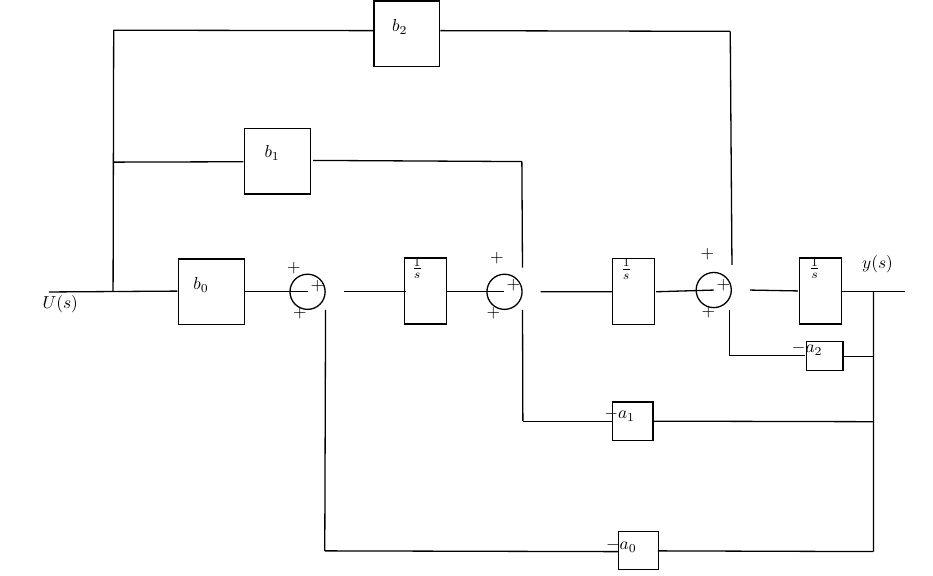
Figura 1: possibile realizzazione della funzione di trasferimento assegnata.
A partire dalle matrici  ,
,  e
e  ottenute (
ottenute ( ) si può verificare la correttezza della realizzazione ricavando la relativa funzione di trasferimento con la formula
) si può verificare la correttezza della realizzazione ricavando la relativa funzione di trasferimento con la formula
![\[G(s)=\left(sI^{-1}-A\right)^{-1}B+D\]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-10bea13c47ee2d25e4126f550e8a1454_l3.svg "Rendered by QuickLaTeX.com")
e verificando di ottenere una funzione a quella assegnata in traccia.
 . Ricondurre il seguente schema a blocchi:
. Ricondurre il seguente schema a blocchi:

Figura 2.
a

Figura 3.
Tramite riduzioni successive.
Svolgimento.
 .
.

Figura 4.
Ricaviamo il sistema equivalente della retroazione composta dai sistemi  e
e  .
.

Figura 5.
Consideriamo la retroazione positiva dei blocchi  e
e  .
.

Figura 6.
Di conseguenza, è possibile riscrivere la funzione nel blocco centrale, modificando così il sistema nel seguente modo.

Figura 7.
Possiamo effettuare il prodotto delle funzioni nella catena diretta.

Figura 8.
E dunque il sistema equivale a

Figura 9.
Questo conclude lo svolgimento dell’esercizio.
 . Considerando il sistema illustrato in Figura 10, si proceda con l’identificazione di una rappresentazione in spazio di stato (ISU) per il sistema. Successivamente, si analizzi e si valuti la sua stabilità interna.
. Considerando il sistema illustrato in Figura 10, si proceda con l’identificazione di una rappresentazione in spazio di stato (ISU) per il sistema. Successivamente, si analizzi e si valuti la sua stabilità interna.

Figura 10: schema a blocchi assegnato.
Svolgimento.
Innanzitutto, è necessario trovare una rappresentazione in Spazio di Stato (ISU) per ciascun blocco che compone il sistema in esame. La rappresentazione di ogni blocco può essere espressa in una forma canonica. Facendo riferimento alla forma canonica di controllo, si ricorda la corrispondenza tra la funzione di trasferimento e le matrici del modello ISU:

Le matrici in forma canonica di controllo sono definite come segue:
![\[ A = \begin{pmatrix} 0 & 1 & 0 & \dots & 0 \\ 0 & 0 & 1 & \dots & 0 \\ \vdots & \vdots & \ddots & \ddots & \vdots \\ 0 & 0 & \dots & 0 & 1 \\ -a_1 & -a_2 & \dots & -a_{n-1} & -a_n \end{pmatrix}, \quad B = \begin{pmatrix} 0 \\ \vdots \\ 0 \\ 1 \end{pmatrix}, \quad \text{e} \quad C = \begin{pmatrix} b_1 & b_2 & \dots & b_n \end{pmatrix}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-af834d52556a0d33c0832440786289c6_l3.svg "Rendered by QuickLaTeX.com")
Per il blocco 1 si ha:
![\[ A=-1,\quad B=1,\quad C=1. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-b93af084b01cd09d90b16a0566077421_l3.svg "Rendered by QuickLaTeX.com")
![\[ \begin{cases} \dot{x}_1=-x_1+u_1=-x_1+(u-y_2) \\ y_1=x_1. \end{cases} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-916aac6157286c2160d63e5f9e98b005_l3.svg "Rendered by QuickLaTeX.com")
Per il blocco 2 si ha:
![\[ A=1,\quad B=1,\quad C=2. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-4488367b12cf73077c3841f50292bf3b_l3.svg "Rendered by QuickLaTeX.com")
![\[ \begin{cases} \dot{x}_2=x_2+u_2=x_2+y_1-y=x_2+x_1-x_3 \\ y_2=2x_2 \end{cases} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-9a1bc03835563d2ecce61ef5c7267cf5_l3.svg "Rendered by QuickLaTeX.com")
e infine per il blocco 3:
![\[ \begin{cases} \dot{x}_3=-x_3+u_3=-x_3+x_1-x_3 \\ \dot{x}_2=-2x_3+x_1 \\ y=x_3. \end{cases} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-d250f765f3b83edd103cee20098d1449_l3.svg "Rendered by QuickLaTeX.com")
Dunque, il sistema completo eredita le variabili di stato di ciascun sistema componente:
![\[ \begin{cases} \dot{x}_1=-x_1-2x_2+u \\ \dot{x}_2=x_1+x_2-x_3 \\ \dot{x}_3=x_1-2x_3 \\ y=x_3. \end{cases} \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-100962a802cde8b5288ac0f2b1302cf1_l3.svg "Rendered by QuickLaTeX.com")
ovvero
![\[ \dot{x}=\underbrace{\begin{pmatrix} -1 & -2 & 0 \\ 1 & 1 & -1 \\ 1 & 0 & -2 \end{pmatrix}}_A \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix}+ \underbrace{\begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}}_Bu \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-5e44e67a11737195865bb0c7e307bae3_l3.svg "Rendered by QuickLaTeX.com")
e
![\[ y=\underbrace{\begin{pmatrix} 0 & 0 & 1 \end{pmatrix}}_{C}\begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-952643217456274b6235cde2ce788bae_l3.svg "Rendered by QuickLaTeX.com")
Gli autovalori del sistema sono le soluzioni della seguente equazione
![\[ \det\left(A-\lambda I\right) = 0 \quad \Rightarrow \quad \lambda^3-2\lambda^2+1=0 \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-aaa76045422cfad9abfbe9418a88ee27_l3.svg "Rendered by QuickLaTeX.com")
da cui
![\[ \lambda \approx \text{0,61}, \quad \lambda \approx \text{1,61}, \quad \lambda \approx -1. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-6a98cd36ced27cb2001cc2a581d9059d_l3.svg "Rendered by QuickLaTeX.com")
Poiché uno degli autovalori è maggiore di zero, il sistema è instabile.
In alternativa, per valutare la stabilità, si può calcolare la funzione di trasferimento del sistema complessivo:
![\[ G(s) = C(sI - A)^{-1}B + D \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ff8b418a8d99df195afea8b52ac6d008_l3.svg "Rendered by QuickLaTeX.com")
![\[ G(s) = \frac{s - 1}{s^3 + 2s^2 - s}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-ca03e15581a7060fa1d26e670e3242e9_l3.svg "Rendered by QuickLaTeX.com")
Poiché nella funzione di trasferimento non ci sono cancellazioni zero/polo, i poli di coincidono con gli autovalori del sistema. Pertanto, analizzando i poli di , si possono trarre conclusioni sulla stabilità interna del sistema.
Tutte le cartelle di controlli automatici
Leggi...
- Analisi nel dominio di Laplace e del tempo di sistemi dinamici LTI a tempo continuo
- Analisi modale di sistemi dinamici LTI a tempo continuo
- Linearizzazione di sistemi dinamici
- Analisi della Stabilità dei Sistemi LTI
- Stabilità dell’equilibrio di sistemi dinamici non lineari
- Retroazione statica dallo stato
- Analisi nel dominio del tempo e della trasformata Zeta di sistemi dinamici LTI a tempo discreto
- Trasformata Zeta
- La risposta in frequenza
- Analisi modale di sistemi dinamici LTI a tempo discreto
- La carta di Nichols
- Proprietà della risposta allo scalino
- Schemi a blocchi e loro combinazioni
- I diagrammi di Bode
- I diagrammi di Nyquist
- Il progetto del controllore
- Il luogo delle radici
- Stabilità in condizioni perturbate: i margini
- I regolatori PID
- Le reti compensatrici
- Modellistica dei sistemi dinamici meccanici, elettrici
- Proprietà strutturali dei sistemi
- Sintesi del modello di stato ISU
- Sintesi dell’osservatore asintotico dello stato