 . Studiare la rispota allo scalino unitario del sistema descritto dalla seguente funzione di trasferimento:
. Studiare la rispota allo scalino unitario del sistema descritto dalla seguente funzione di trasferimento:

Svolgimento.
Il sistema analizzato è di primo ordine e non strettamente proprio. È possibile determinare il valore iniziale del sistema mediante il limite

Dato che il polo del sistema è reale e negativo, possiamo calcolare il valore asintotico finale utilizzando il teorema del valore finale come

Il tempo di assestamento  , espresso in secondi, si determina come
, espresso in secondi, si determina come

dove  rappresenta il prodotto della costante di tempo
rappresenta il prodotto della costante di tempo  per il fattore
per il fattore  , indicativo del tempo necessario affinché la risposta del sistema si assesti entro una certa percentuale del valore finale.
, indicativo del tempo necessario affinché la risposta del sistema si assesti entro una certa percentuale del valore finale.
Segue la rappresentazione grafica della risposta del sistema.
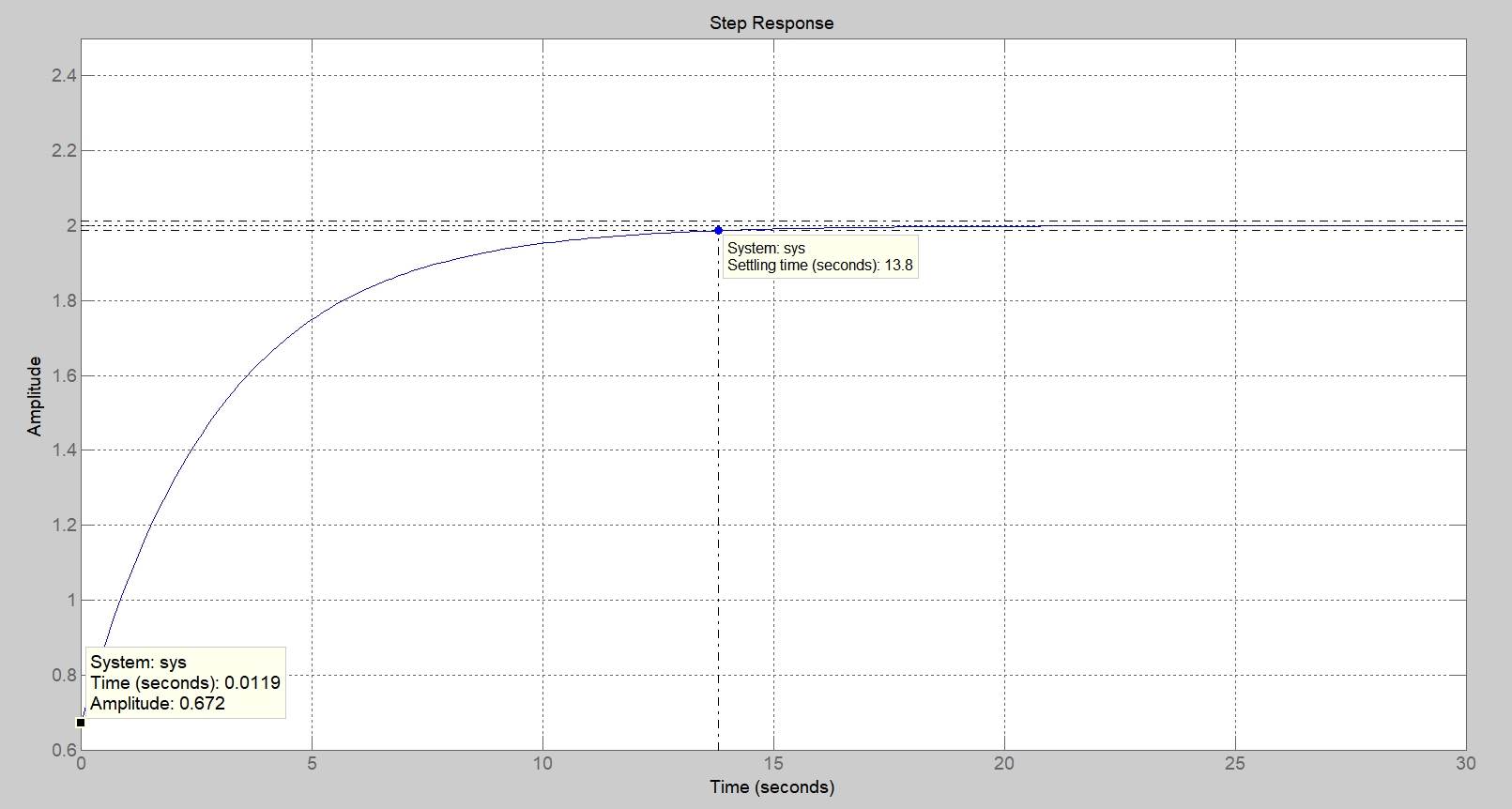
Figura 1: risposta allo scalino del problema proposto.
 . Studiare la risposta allo scalino unitario del sistema avente la seguente funzione di trasferimento
. Studiare la risposta allo scalino unitario del sistema avente la seguente funzione di trasferimento

Svolgimento.
 , che risultano essere
, che risultano essere  . Si possono determinare il coefficiente di smorzamento
. Si possono determinare il coefficiente di smorzamento  e la pulsazione naturale
e la pulsazione naturale  della coppia di poli tramite l’equazione caratteristica:
della coppia di poli tramite l’equazione caratteristica:

Utilizzando il teorema del valore iniziale, il valore iniziale dell’uscita è:

Poiché i poli hanno parte reale negativa, è applicabile il teorema del valore finale:

Di seguito, altri parametri significativi della risposta dinamica del sistema: a) Tempo di assestamento:

con  che rappresenta la parte reale dei poli.
b) Periodo delle oscillazioni:
che rappresenta la parte reale dei poli.
b) Periodo delle oscillazioni:

c) Tempo del primo picco:

d) Ampiezza del primo picco, con  rappresentante il guadagno a regime pari a 100:
rappresentante il guadagno a regime pari a 100:
![\begin{equation*} y_p = \mu\left[1 + \exp\left(-\frac{\xi\pi}{\sqrt{1-\xi^2}}\right)\right] = 116. \end{equation*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-c68bdc40fb401e815f63a4f44a3e2adf_l3.svg "Rendered by QuickLaTeX.com")
Segue la rappresentazione grafica della risposta del sistema.
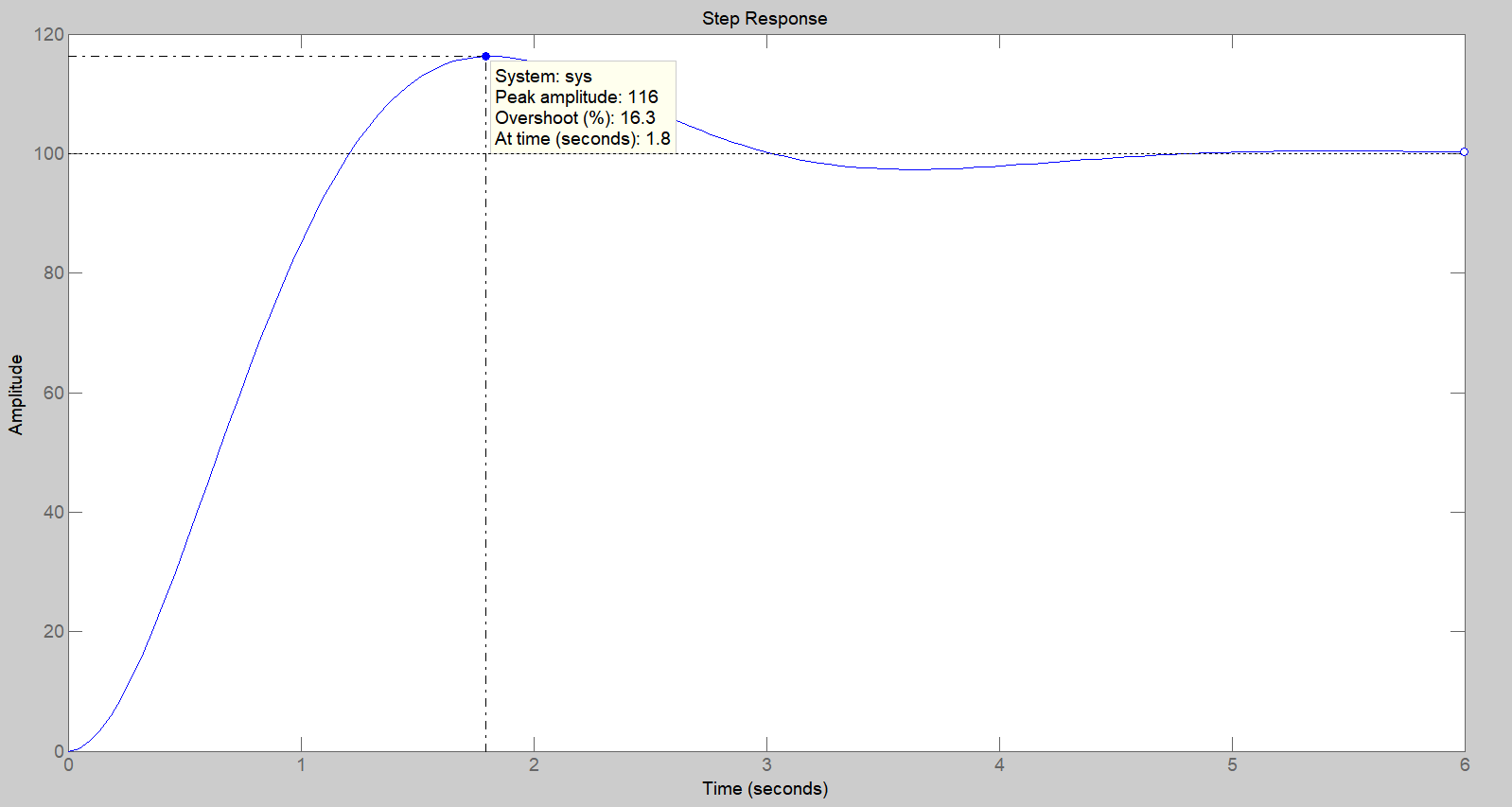
Figura 2: risposta allo scalino del sistema proposto.
Tutte le cartelle di controlli automatici
Leggi...
- Analisi nel dominio di Laplace e del tempo di sistemi dinamici LTI a tempo continuo
- Analisi modale di sistemi dinamici LTI a tempo continuo
- Linearizzazione di sistemi dinamici
- Analisi della Stabilità dei Sistemi LTI
- Stabilità dell’equilibrio di sistemi dinamici non lineari
- Retroazione statica dallo stato
- Analisi nel dominio del tempo e della trasformata Zeta di sistemi dinamici LTI a tempo discreto
- Trasformata Zeta
- La risposta in frequenza
- Analisi modale di sistemi dinamici LTI a tempo discreto
- La carta di Nichols
- Proprietà della risposta allo scalino
- Schemi a blocchi e loro combinazioni
- I diagrammi di Bode
- I diagrammi di Nyquist
- Il progetto del controllore
- Il luogo delle radici
- Stabilità in condizioni perturbate: i margini
- I regolatori PID
- Le reti compensatrici
- Modellistica dei sistemi dinamici meccanici, elettrici
- Proprietà strutturali dei sistemi
- Sintesi del modello di stato ISU
- Sintesi dell’osservatore asintotico dello stato