 . Dato lo schema di controllo in figura:
. Dato lo schema di controllo in figura:

dove:

Si vuole progettare il regolatore  di tipo PID in modo tale che:
di tipo PID in modo tale che:
 per
per  ;
;  ;
; sia la massima possibile.
sia la massima possibile.
Svolgimento.
Affinché l’errore a regime sia nullo, occorre che nel prodotto regolatore del processo ci sia un polo in zero, poiché manca nel processo. È necessaria un’azione integrale nel regolatore. Il regolatore PID può essere espresso in due forme alternative:


dove  e
e  rappresentano rispettivamente le costanti di tempo integrative e derivative. Una volta selezionata una delle due formulazioni per il regolatore, è necessario aggiungere un polo ad alta frequenza per garantire la realizzabilità fisica del controllore.
rappresentano rispettivamente le costanti di tempo integrative e derivative. Una volta selezionata una delle due formulazioni per il regolatore, è necessario aggiungere un polo ad alta frequenza per garantire la realizzabilità fisica del controllore.
Inizialmente, si può considerare che il regolatore implementi esclusivamente un’azione integrale:

e procedere alla valutazione del margine di fase della funzione d’anello risultante  .
.
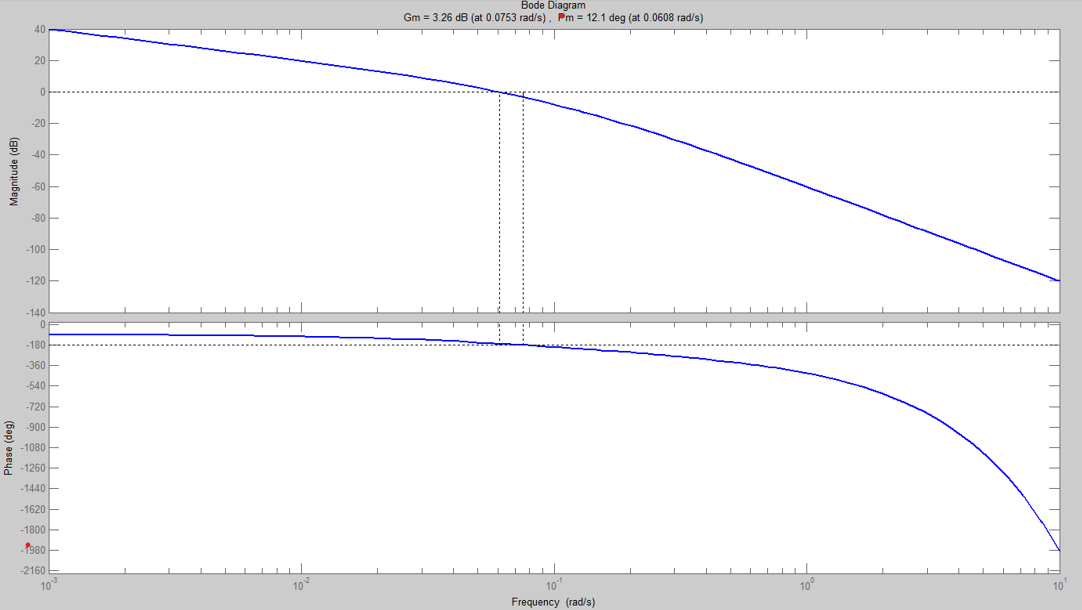
Figura 1: diagramma di Bode della funzione d’anello.
Dopo l’analisi, si osserva un margine di fase di  , che risulta inferiore al valore desiderato. Pertanto, facendo riferimento alla forma espressa dall’equazione (3), le costanti di tempo degli gli zeri del regolatore vanno scelte in modo che cancellino i poli della
, che risulta inferiore al valore desiderato. Pertanto, facendo riferimento alla forma espressa dall’equazione (3), le costanti di tempo degli gli zeri del regolatore vanno scelte in modo che cancellino i poli della  così da migliorare il margine di fase della funzione d’anello. Di conseguenza, la nuova configurazione del sistema diventa:
così da migliorare il margine di fase della funzione d’anello. Di conseguenza, la nuova configurazione del sistema diventa:


Figura 2: diagramma di Bode della funzione d’anello con l’introduzione del regolatore.
Il margine di fase ottenuto è di  , il che soddisfa le specifiche richieste. Tuttavia, è necessario valutare il massimo valore del guadagno
, il che soddisfa le specifiche richieste. Tuttavia, è necessario valutare il massimo valore del guadagno  che può essere introdotto senza superare il margine di fase desiderato. La pulsazione critica
che può essere introdotto senza superare il margine di fase desiderato. La pulsazione critica  corrisponde al punto in cui il sistema raggiunge il massimo margine di fase possibile senza infrangere i requisiti specificati, ovvero:
corrisponde al punto in cui il sistema raggiunge il massimo margine di fase possibile senza infrangere i requisiti specificati, ovvero:

Per mantenere il guadagno entro i limiti consentiti, non deve aumentare oltre gli  , da cui si ricava:
, da cui si ricava:

Per assicurare la realizzabilità fisica della funzione di trasferimento del regolatore, si può aggiungere un ulteriore polo a una pulsazione significativamente più alta rispetto a quella dei poli e degli zeri esistenti, ad esempio a  . Di conseguenza, la funzione di trasferimento del regolatore assume la forma:
. Di conseguenza, la funzione di trasferimento del regolatore assume la forma:

 . Dato il sistema descritto dalla funzione di trasferimento:
. Dato il sistema descritto dalla funzione di trasferimento:

Si progetti un controllore PID tale che assicuri:
- errore a regime nullo per un ingresso a scalino;
- banda a
 per il sistema ad anello chiuso
per il sistema ad anello chiuso  ;
; - sovraelongazione percentuale
 .
.
Svolgimento.
Per soddisfare la specifica sull’errore a regime, è necessaria l’azione integrativa. A partire dalla specifica sulla sovraelongazione,  , si ottiene
, si ottiene  , il che implica un margine di fase
, il che implica un margine di fase  .
.
Dalla specifica sulla banda passante, utilizzando gli abachi, si hanno le seguenti relazioni:

Valutando le caratteristiche del sistema, si ottiene:
![\begin{align*} \left| P(j\omega_t) \right| &= \frac{1}{\sqrt{9 + \omega_t^2}} = \text{0,26}, \\[10pt] \angle P(j\omega_t) &= -\text{0,1} \omega_t \frac{180}{\pi} - \arctan\left(\frac{\omega_t}{3}\right) = -51^\circ, \\[10pt] \phi_m &= 180^\circ - 51^\circ = 129^\circ. \end{align*}](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-a0c3d1193f06e96d441d3b5f734d8f7f_l3.svg "Rendered by QuickLaTeX.com")
Il margine di fase prima di introdurre l’azione integrale è più di quello desiderato, quindi non occorre azione derivativa, quindi è sufficiente ricavare la costante proporzionale e quella integrativa, come segue:
![\[ K_p = \frac{\cos(60^\circ - 129^\circ)}{|P(j\omega_t)|} = \text{1,38}, \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-e5be298f7a5af2ef57260d17d29c47fd_l3.svg "Rendered by QuickLaTeX.com")
![\[ \frac{1}{\omega_t T_i} = \tan(60^\circ - 129^\circ) \quad \rightarrow \quad T_i = \text{0,16}\, \text{s}. \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-97cd7d1a09af1f504602212711be7534_l3.svg "Rendered by QuickLaTeX.com")
Quindi il controllore cercato è:
![\[ R(s) = \text{1,38} \left( 1 + \frac{1}{\text{0,16}s} \right). \]](https://quisirisolve.com/wp-content/ql-cache/quicklatex.com-db7610768caa92d9a9300a1f3d292968_l3.svg "Rendered by QuickLaTeX.com")
 . Dato il sistema descritto da
. Dato il sistema descritto da

Con la taratura analitica tarare un controllore PID che soddisfi le seguenti specifiche:
- errore a gradino nullo;
 ;
; .
.
Svolgimento.

dove  rappresenta la fase che il PID deve introdurre alla pulsazione di taglio
rappresenta la fase che il PID deve introdurre alla pulsazione di taglio  desiderata; è la pulsazione di taglio desiderata per la funzione d’anello
desiderata; è la pulsazione di taglio desiderata per la funzione d’anello  ; e può assumere valori tali che
; e può assumere valori tali che  . Se il valore di da introdurre è negativo, non è necessaria l’azione derivativa.
. Se il valore di da introdurre è negativo, non è necessaria l’azione derivativa.
Le specifiche vengono tradotte in obiettivi da raggiungere per la funzione ad anello aperto:

scegliendo  si ottiene
si ottiene  .
.
Utilizzando gli abachi, si ottiene:

La specifica sull’errore a regime nullo impone l’uso dell’azione integrale. L’analisi del diagramma di Bode mostra che, in assenza di regolazione, il sistema presenta le seguenti caratteristiche a :

Sebbene  sia maggiore di quello desiderato, l’azione integrale ne risentirebbe comunque. È possibile permettere al regolatore una riduzione di fase di
sia maggiore di quello desiderato, l’azione integrale ne risentirebbe comunque. È possibile permettere al regolatore una riduzione di fase di  a , impostando
a , impostando  .
.
Di conseguenza, non occorre l’azione derivativa e le formule diventano:

da cui si ricavano:

Pertanto, la funzione di trasferimento del regolatore desiderato è:

Tutte le cartelle di controlli automatici
Leggi...
- Analisi nel dominio di Laplace e del tempo di sistemi dinamici LTI a tempo continuo
- Analisi modale di sistemi dinamici LTI a tempo continuo
- Linearizzazione di sistemi dinamici
- Analisi della Stabilità dei Sistemi LTI
- Stabilità dell’equilibrio di sistemi dinamici non lineari
- Retroazione statica dallo stato
- Analisi nel dominio del tempo e della trasformata Zeta di sistemi dinamici LTI a tempo discreto
- Trasformata Zeta
- La risposta in frequenza
- Analisi modale di sistemi dinamici LTI a tempo discreto
- La carta di Nichols
- Proprietà della risposta allo scalino
- Schemi a blocchi e loro combinazioni
- I diagrammi di Bode
- I diagrammi di Nyquist
- Il progetto del controllore
- Il luogo delle radici
- Stabilità in condizioni perturbate: i margini
- I regolatori PID
- Le reti compensatrici
- Modellistica dei sistemi dinamici meccanici, elettrici
- Proprietà strutturali dei sistemi
- Sintesi del modello di stato ISU
- Sintesi dell’osservatore asintotico dello stato